Cet article décrit comment importer des données de scan au format E57/LAS/LAZ générique en utilisant Cintoo Connect et explore différentes options pour formater le fichier CSV accompagnant.
Autorisations : utilisateurs avec des rôles incluant Importer ou supprimer des données de réalité permission peuvent importer des scans au format générique non structuré avec Cintoo Connect.
TABLE DES MATIÈRES
- Téléchargement de fichiers E57/LAS/LAZ génériques à l'aide de Cintoo Connect
- Exigences pour le chemin de numérisation
- Utilisation de quaternions pour l'orientation
- Utilisation d'une valeur de Heading pour l'orientation
Les données attendues par Cintoo Connect pour cette option de téléchargement sont les suivantes :
- Nuage de points non structuré au format E57, LAS ou LAZ
- Trajectoire /chemin de numérisation au format CSV (voir Exigences pour le chemin de numérisation)
Téléchargement de fichiers E57/LAS/LAZ génériques à l'aide de Cintoo Connect
1. Ouvrez l'onglet Données et cliquez sur Préparer & télécharger sur la tuile Scans laser mobiles ou cliquez sur Mobile scan dans le menu Ajouter déroulant en haut à droite. Cintoo Connect se lancera.
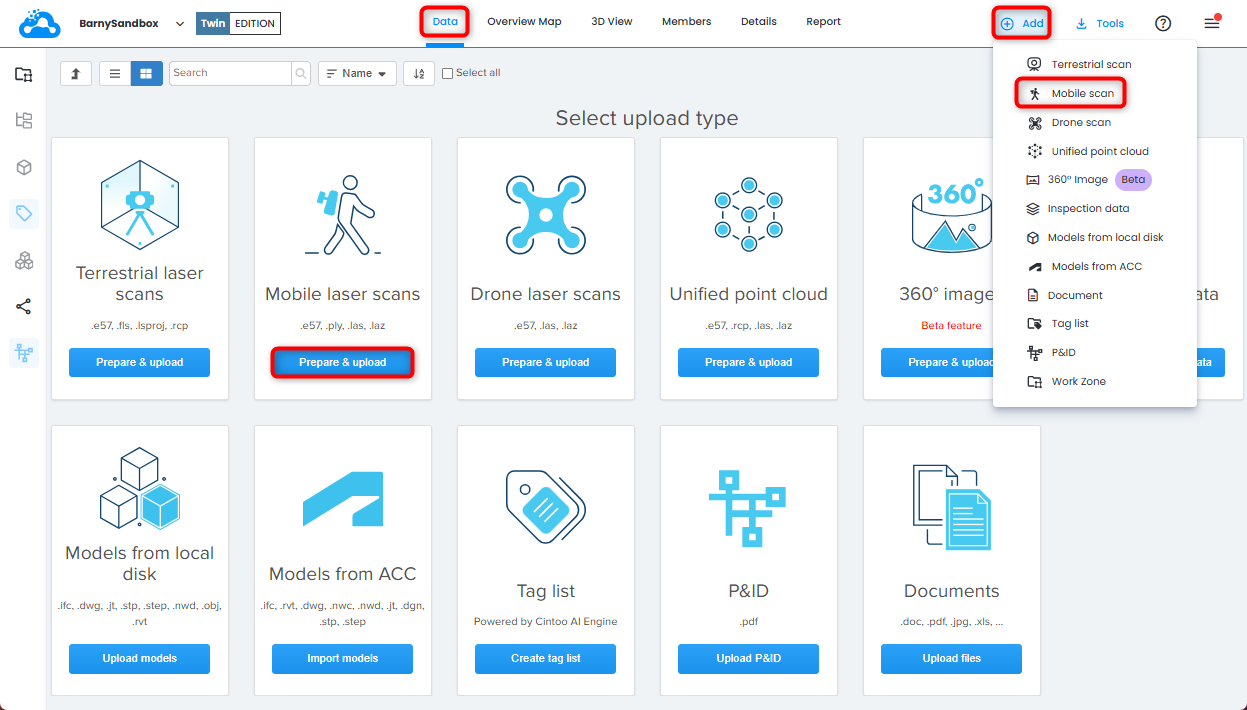
2. Dans l'onglet Mobile Laser Scans de Cintoo Connect, sélectionnez Generic E57/LAS/LAZ comme Device/Format.

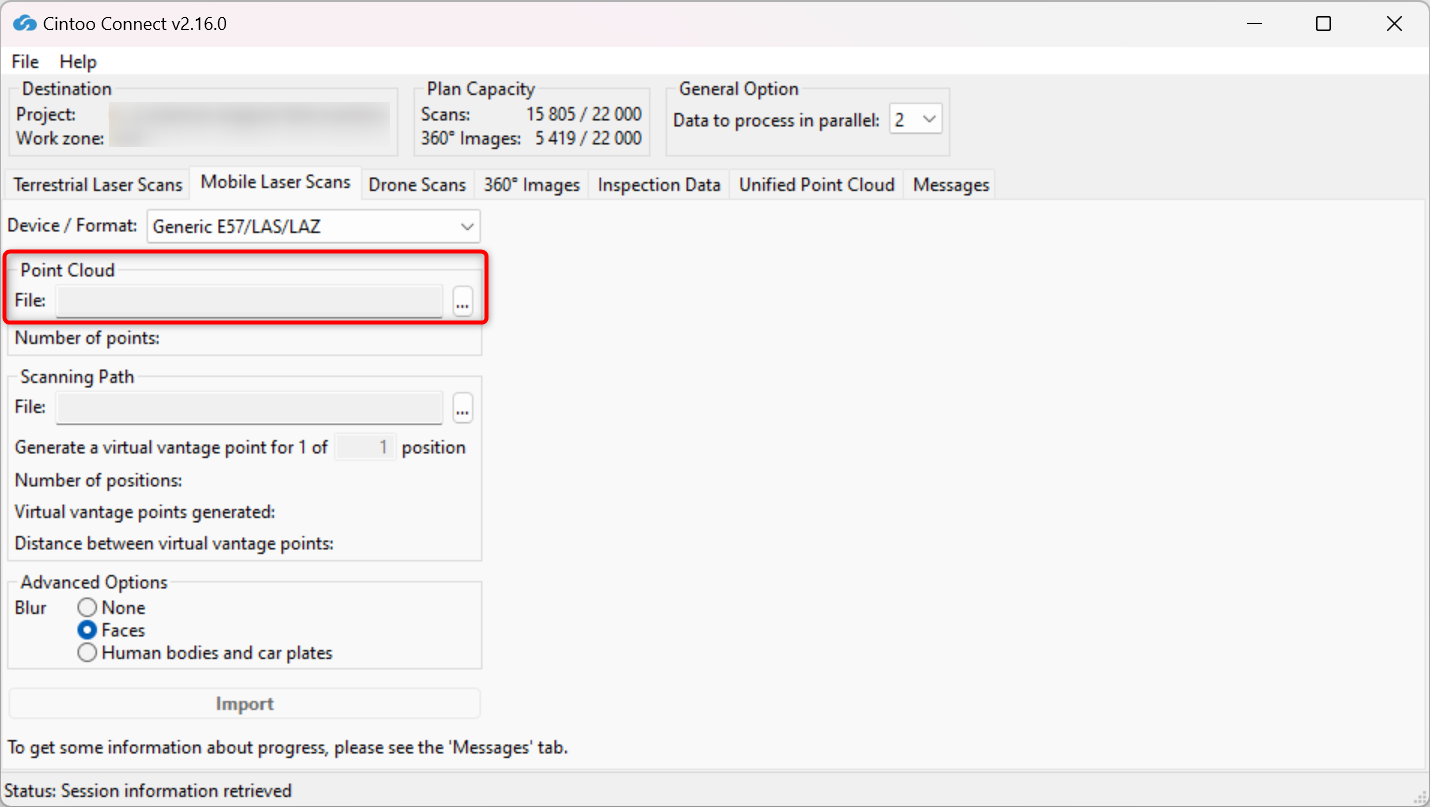
3. Sélectionnez le fichier E57, LAS ou LAZ comme Point Cloud.
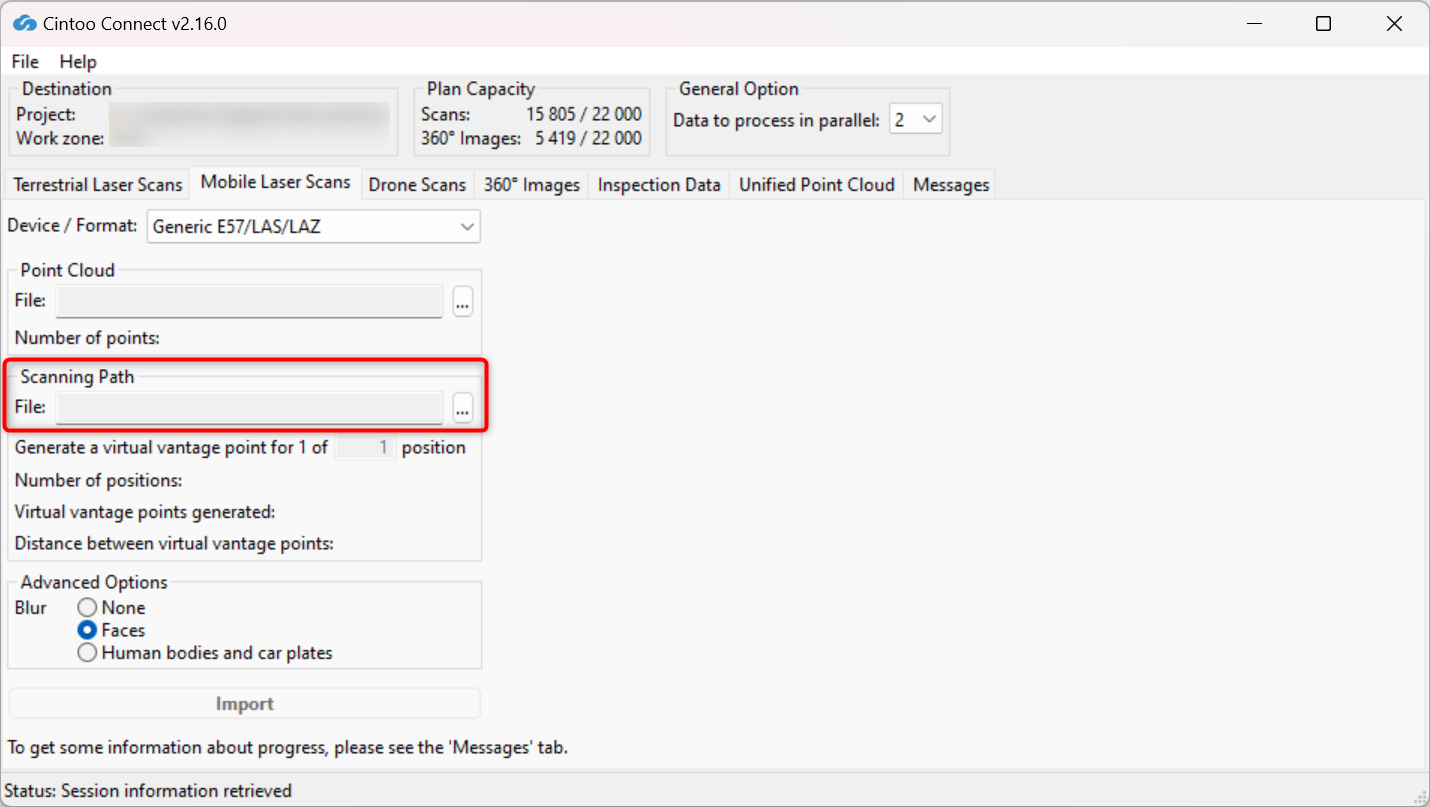
4. Sélectionnez le fichier CSV comme Chemin de numérisation.
Voir Exigences pour le chemin de numérisation pour plus d'informations.
5. Modifiez la valeur d'échantillonnage de position selon les besoins en entrant une valeur dans Générer un point de vue virtuel pour 1 de __ position.
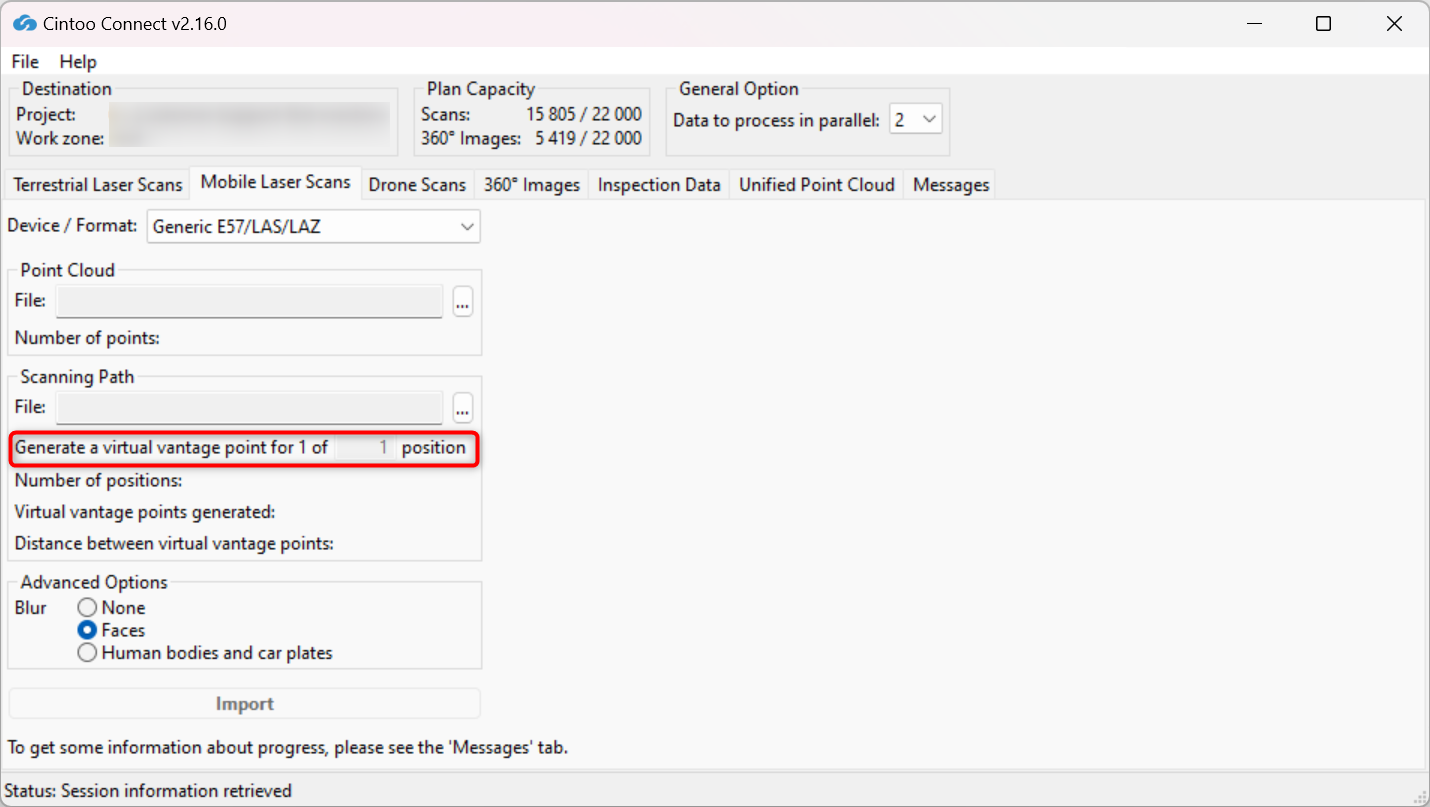
- Par exemple, 1 de 1 position créera 1 point de vue virtuel (VVP) dans Cintoo pour chaque position incluse dans le fichier CSV du chemin de numérisation. 1 de 4 positions créera 1 VVP à chaque 4ème position incluse dans le fichier CSV du chemin de numérisation.
- Le nombre de VVP et la distance moyenne entre chacun seront indiqués dans Cintoo Connect et seront ajoutés au décompte des numérisations.
6. Activez ou désactivez Flou - Faces.
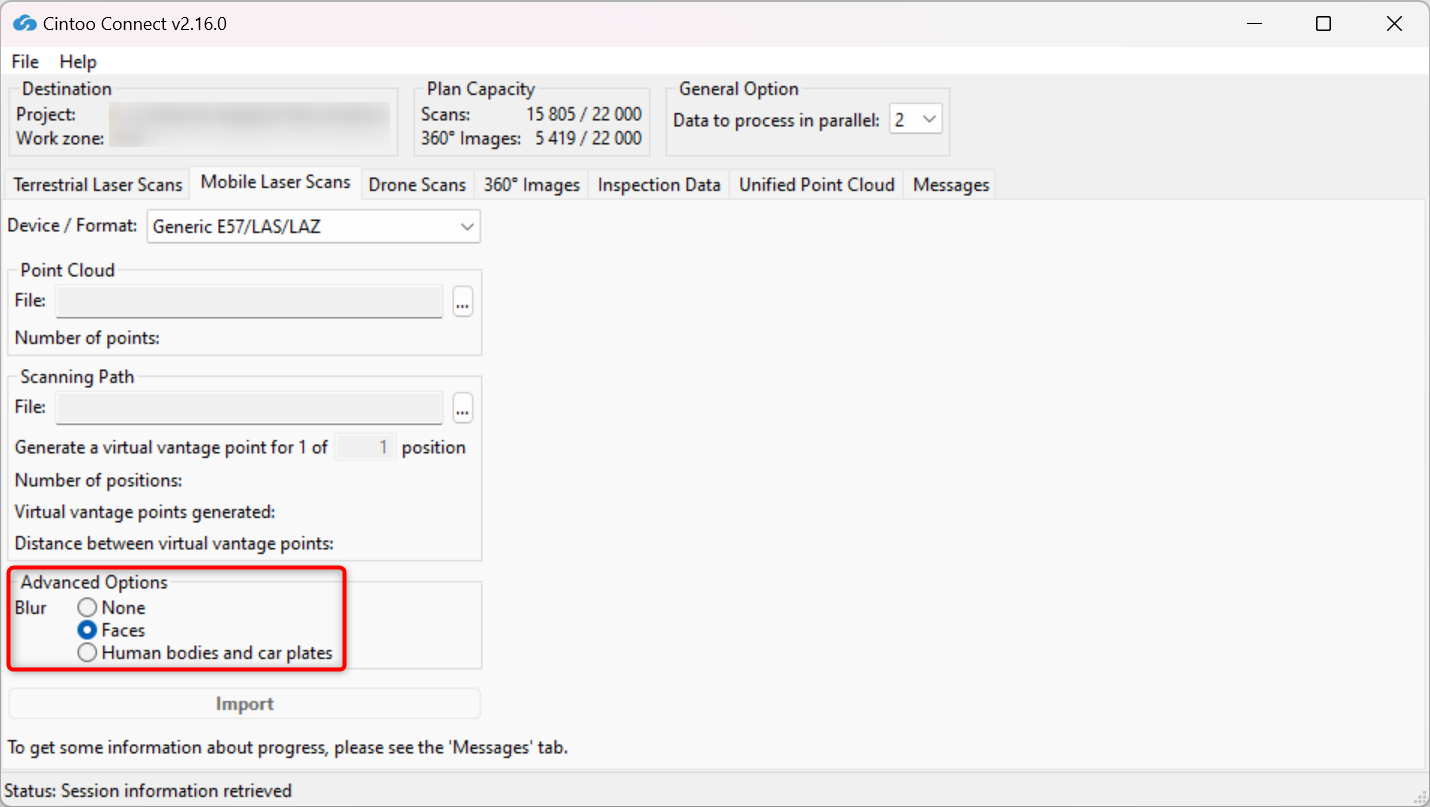
- Cette option est activée par défaut, choisissez l'option Aucun pour ne pas appliquer de floutage.
- Cette option floute automatiquement les visages capturés dans toutes les images panoramiques incluses dans les scans téléchargés sur Cintoo.
- Le floutage ne peut pas être annulé dans Cintoo après que les scans ont été téléchargés.
- Tout fichier téléchargé sans l'option Flou - Visages activée doit être supprimé du projet Cintoo et re-téléchargé avec l'option cochée pour appliquer le floutage automatique des visages.
7. Activez ou désactivez Flou - Corps humains et plaques d'immatriculation :
- Cette option est désactivée par défaut, l'option Visages est choisie.
- Activez cette option pour flouter automatiquement les corps humains y compris les visages et les plaques d'immatriculation capturés sur toutes les images panoramiques incluses dans les scans téléchargés sur Cintoo.
- Le floutage ne peut pas être annulé dans Cintoo après que les scans ont été téléchargés.
- Tout fichier téléchargé sans l'option Flou - Corps humains et plaques d'immatriculation activée doit être supprimé du projet Cintoo et re-téléchargé avec l'option cochée pour appliquer le floutage automatique.
Avertissement : utilisez avec précaution uniquement si c'est impératif, car le temps d'importation des scans pourrait être doublé avec l'option activée.
8. Modifiez la valeur de Données à traiter en parallèle selon les besoins et en fonction des cœurs PC disponibles.
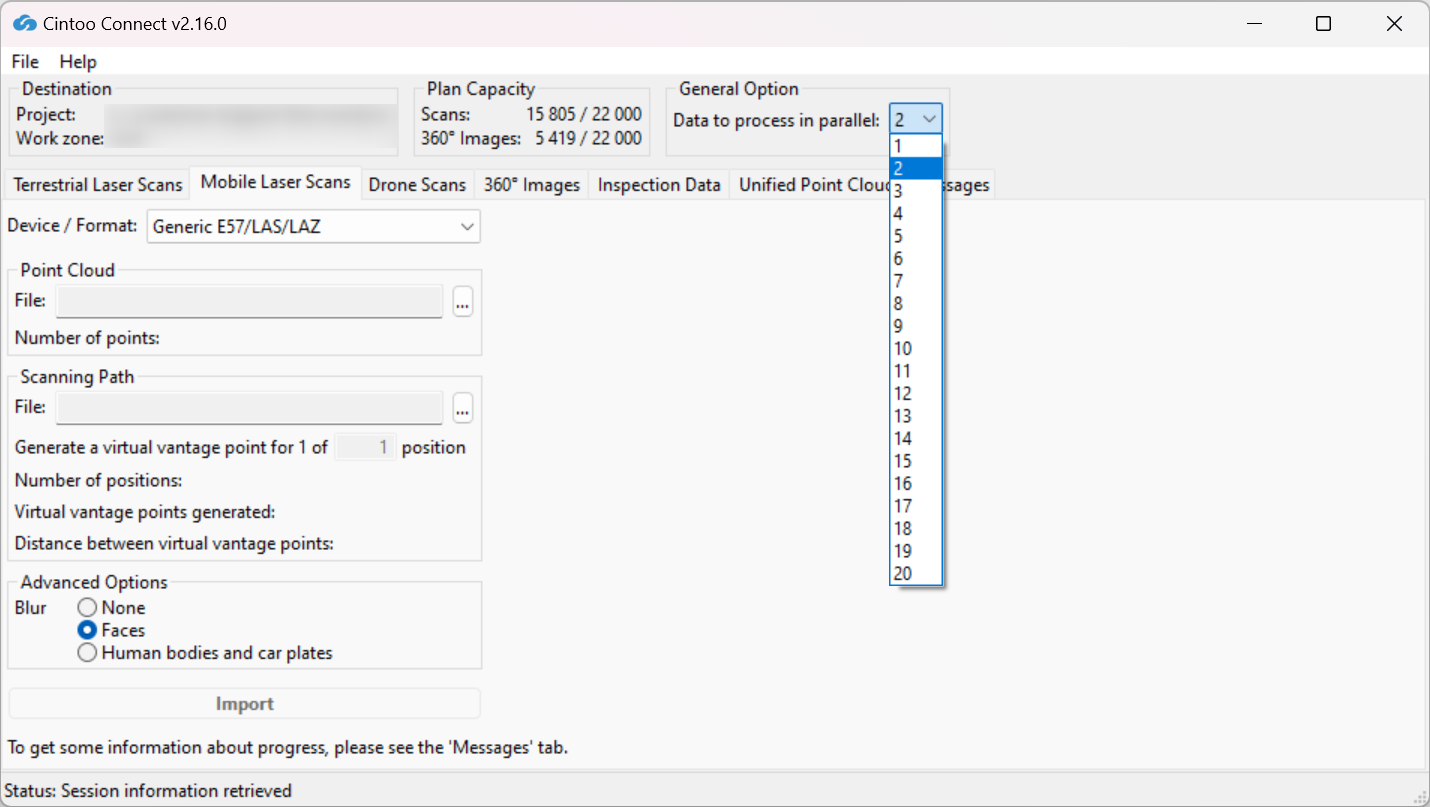
Avec un PC multi-cœurs, il est possible de traiter plus de 2 scans (paramètre par défaut) en parallèle.
En moyenne, au moins 400 Mo de RAM par 10 millions de pixels sont nécessaires pour le traitement. Par exemple :
- 8 GB de RAM permettront de traiter 5 scans de 40 million de pixels chacune en parallèle.
- 64 GB de RAM seront nécessaires pour traiter 5 scans de 160 million de pixels chacune en parallèle.
9. Cliquez sur Importer.
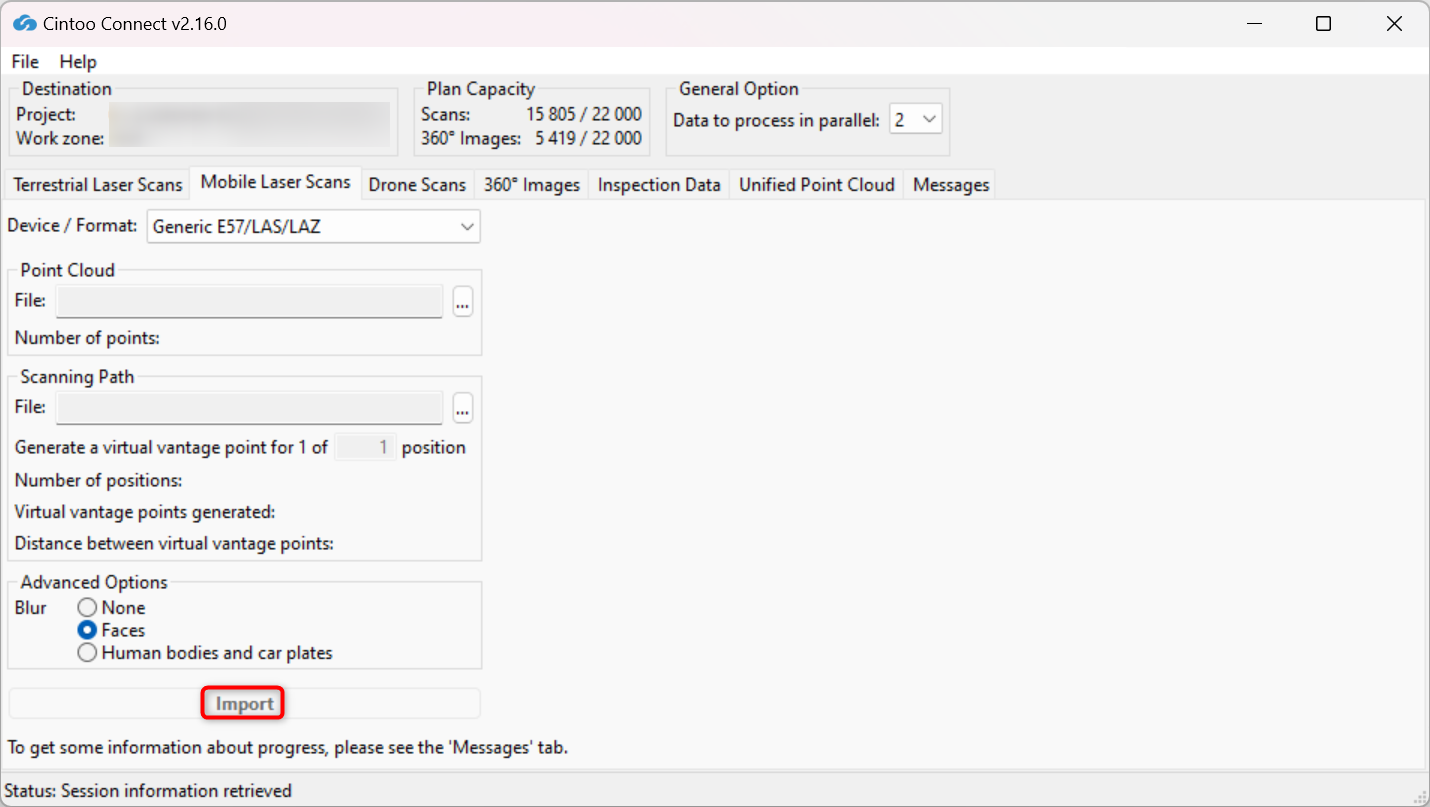
- De nouveaux scans 3D apparaîtront un par un dans le projet Cintoo.
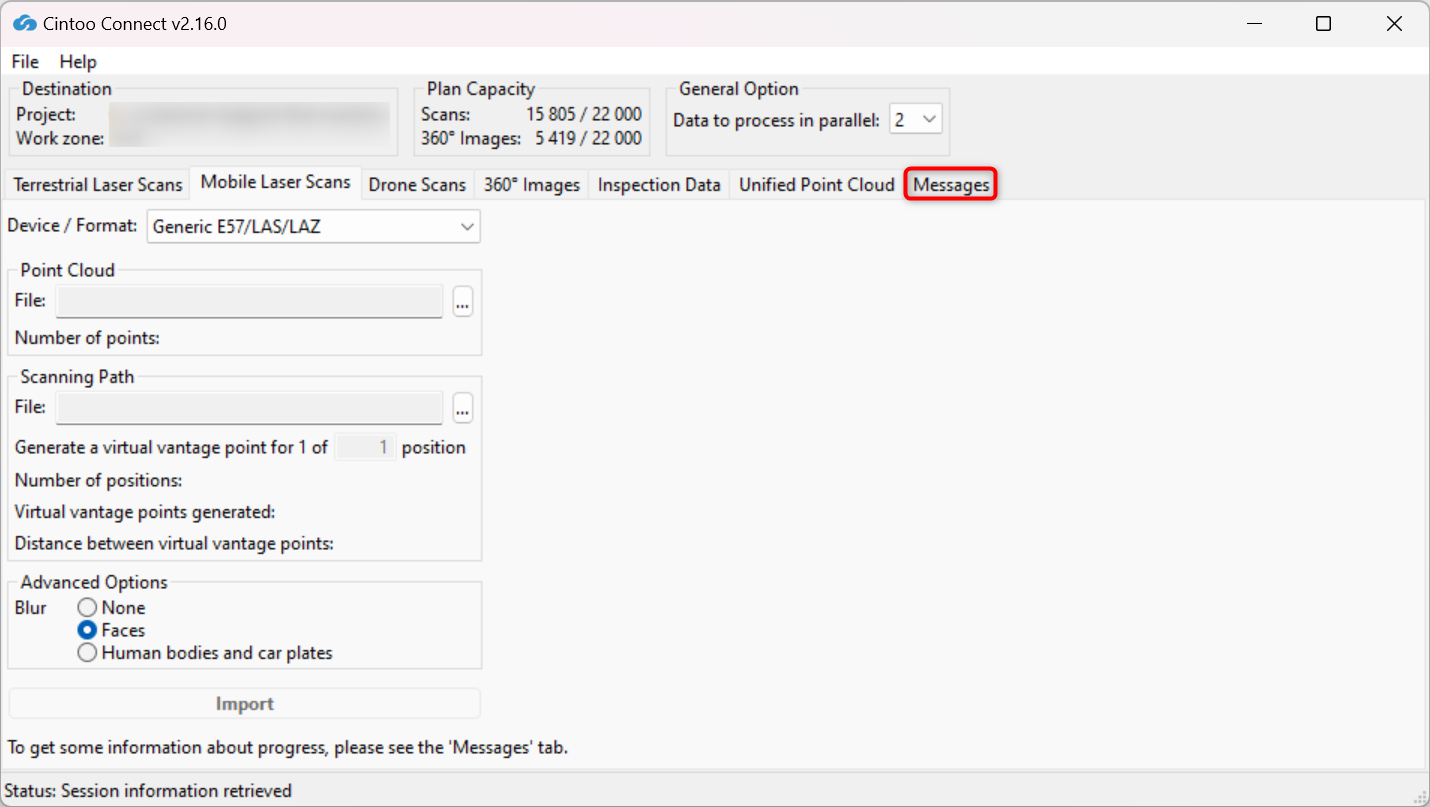
- Vérifiez l'onglet Messages de temps en temps pour confirmer que le processus se déroule bien.
Exigences pour le chemin de numérisation
1. Si l'équipement n'a pas de caméra (aucune photo panoramique n'est capturée).
Créez un fichier CSV contenant les positions X, Y et Z pour chaque nouvelle position de numérisation 3D à créer.
- Utilisez la virgule ',' comme séparateur de colonnes.
- Nommez les colonnes comme suit : filename, x, y, z, qw, qx, qy, qz
- Les valeurs de x, y et z doivent être dans les unités du projet, dans le même système de coordonnées que les numérisations.
- Lors du traitement des données de nuages de points, Cintoo Connect créera une position de numérisation 3D à chacun de ces emplacements XYZ, ainsi qu'une image panoramique issue du nuage de points (avec ou sans couleur selon la colorisation du nuage de points).
2. Si l'équipement a capturé des images panoramiques.
Les images associées à 360° doivent être stockées dans un seul dossier, avec un fichier CSV contenant les informations sur l'emplacement et l'orientation de chaque panorama. Les formats attendus sont les suivants :
Toutes les images 360° doivent être des images sphériques au format JPEG ou PNG. Exemple d'image sphérique.

Le même dossier doit inclure un fichier CSV contenant le nom de l'image 360° (avec extension), l'emplacement et l'orientation, pour chaque image 360°.
Le fichier CSV devra être comme suit :
- Utilisez la virgule (,) comme séparateur de colonnes
- La colonne du nom de fichier doit être nommée filename
- Les noms de fichiers doivent avoir leur extension (.jpg ou .png)
- Pour la position, nommez les colonnes x, y et z
- Les valeurs x, y et z doivent être dans les unités du projet, dans le même système de coordonnées que les scans.
- L'orientation doit être donnée sous forme de quaternion ou de cap simple
Note : puisque la notation quaternion et le Heading sont toutes deux prises en charge comme orientation, il n'est pas possible d'avoir le Heading et le quaternion dans le même CSV. C'est l'un ou l'autre, sinon Cintoo Connect le rejettera.
Utilisation de quaternions pour l'orientation
- Nommez les colonnes qw, qx, qy, qz
- La première colonne doit ressembler à (l'ordre n'a pas d'importance) : filename, x, y, z, qw, qx, qy, qz
- Définissez qw = 1 et qx = qy = qz = 0 pour aucune rotation avec les quaternions.

Utilisation d'une valeur de Heading pour l'orientation
Créez une colonne nommée heading in CSV file.
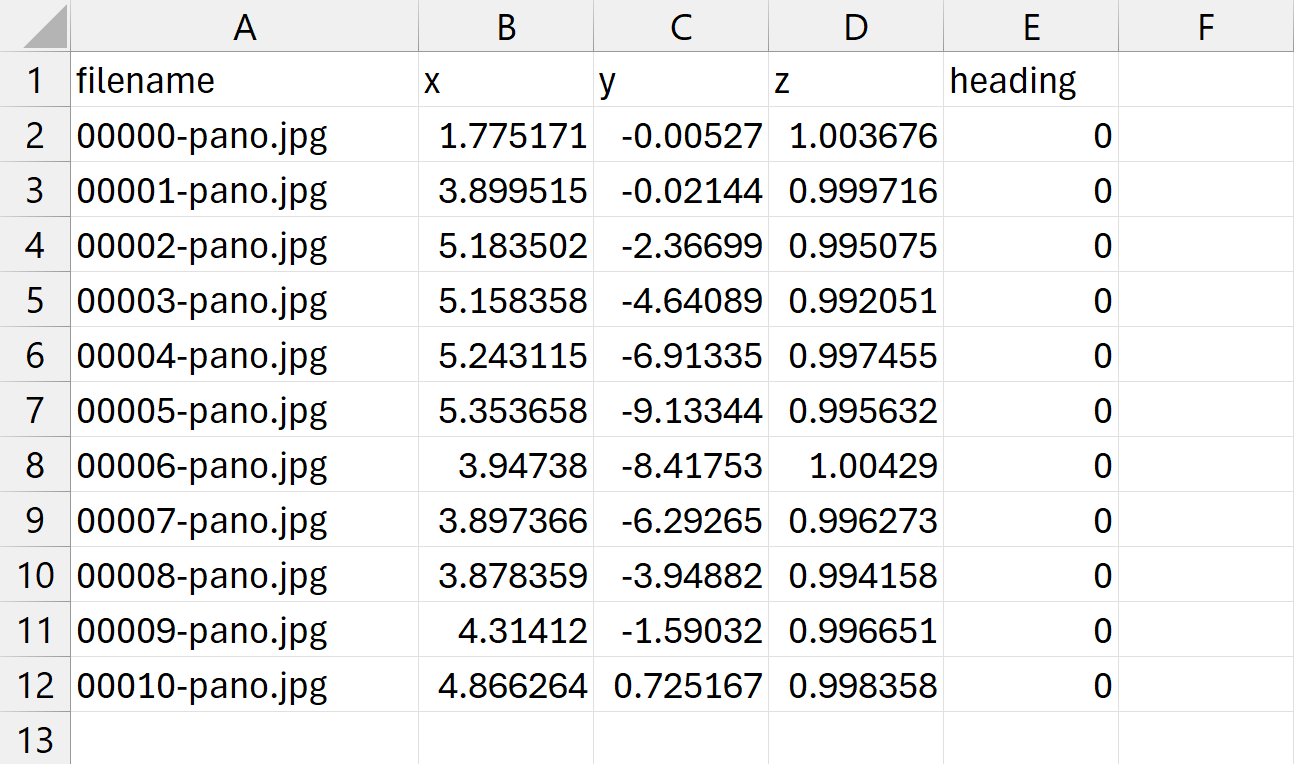
Le paramètre Heading représente l'angle en degrés, rotation autour de l'axe Z. Dans la vue de dessus, un angle positif représente une rotation dans le sens des aiguilles d'une montre (vers l'est).
Remarque : lors de l'utilisation du heading, aucune rotation ne sera appliquée autour des axes X ou Y. Nous supposons que les images à 360° sont bien alignées verticalement (le plan traversant la "ligne d'équateur" doit être parallèle au plan XY), sinon l'image semblera ne pas être droite (exemple : un bâtiment droit semblerait avoir une inclinaison).
L'angle prend comme référence le milieu de l'image et la direction du nord :
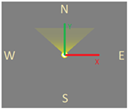
- Heading réglé à 0 degrés signifie que l'utilisateur verra le milieu de l'image lorsqu'il regardera vers le nord (+Y).
- Heading réglé sur 90 degrés signifie que l'utilisateur verra le milieu de l'image lorsqu'il regardera vers l'est (+X).
- Heading réglé sur 180 degrés signifie que l'utilisateur verra le milieu de l'image lorsqu'il regardera vers le sud (-Y).
- Heading réglé sur 270 degrés signifie que l'utilisateur verra le milieu de l'image lorsqu'il regardera vers l'ouest (+X).
Remarque : Navigation Map en bas à droite peut aider à déterminer dans quelle direction l'utilisateur est actuellement orienté.
Cet article a-t-il été utile ?
C'est super !
Merci pour votre commentaire
Désolé ! Nous n'avons pas pu vous être utile
Merci pour votre commentaire
Commentaires envoyés
Nous apprécions vos efforts et nous allons corriger l'article