Cet article décrit le processus d'importation des données de scan de drone dans Cintoo à l'aide de Cintoo Connect, en présentant les exigences, les restrictions et en fournissant un guide étape par étape.
Autorisations: utilisateurs avec des rôles incluant Télécharger ou Supprimer des Données Réalité permission peuvent importer des scans laser de drones avec Cintoo Connect.
TABLE DES MATIÈRES
- Vue d'ensemble des scans de drones
- Exigences et restrictions
- Téléversement des scans de drones à l'aide de Cintoo Connect
- Temps de traitement pour les scans de drone avec Cintoo Connect
Vue d'ensemble des scans de drones
Les photos prises avec un drone et traitées à l'aide de solutions de photogrammétrie telles que Pix4D ou Drone Deploy produisent un nuage de points coloré non structuré. Le téléchargement de ce nuage de points non structuré résultant dans Cintoo nécessite l'installation et l'utilisation de Cintoo Connect Installer Cintoo Connect.
Cintoo Connect traitera alors ce nuage de points non structuré et le restructurera automatiquement.
- La restructuration signifie que Cintoo Connect créera des points de vue virtuels 3D (VVPs) comme si les données du drone provenaient de scanners statiques montés sur un trépied volant, facilitant ainsi l'expérience de navigation.
- La résolution de ces VVPs 3D nouvellement créés est calculée automatiquement en fonction de la résolution du nuage de points non structuré source.
- Il n'y a aucun compromis sur la précision ou la densité du nuage de points lors de l'utilisation de ce processus.
- Chacun de ces VVPs 3D nouvellement créés comptera comme une numérisation dans la capacité de numérisation.
- Téléchargez et exportez depuis Cintoo les VVPs 3D nouvellement créés en tant que nuage de points unifié ou structuré, exactement comme avec les données de scans statiques.
- Fusionnez des scans statiques, des scans mobiles et des VVPs dans Cintoo et naviguez entre eux s'ils partagent le même système de coordonnées.
Exigences et restrictions
Cintoo Connect prend en charge les données suivantes des drones :
- Nuage de points au format de fichier LAS, LAZ ou E57
- Le nuage de points doit couvrir une surface minimale projetée d'au moins 400 mètres carrés
- La densité du nuage de points doit être supérieure à 250 points par mètre carré (= 23 points par pied carré, ou 1 point par 6,25 cm (2,46 po).
- c.-à-d., nombre total de points divisé par la surface de projection au sol

- c.-à-d., nombre total de points divisé par la surface de projection au sol
- Vols horizontaux uniquement, qui peuvent être à diverses altitudes :
- Non couvert : vols verticaux le long de façades de bâtiments ou de pylônes électriques par exemple. Pour importer des vols non horizontaux, veuillez essayer d'utiliser l'option Nuage de points unifié dans Cintoo Connect.

- Si le nuage de points est géoréférencé, le fichier de nuage de points doit avoir une pose.
- Le fichier de nuage de points ne doit contenir qu'un seul nuage de points.
- Pour les infrastructures linéaires, chaque projet doit être inférieur à 10 kilomètres ou 6,2 miles (= distance entre les points les plus extrêmes du projet).
Remarque : si le projet est supérieur à 10 km, il est recommandé de diviser le nuage de points source en morceaux plus petits. Traitez chaque morceau avec une instance de Cintoo Connect distincte, pouvant fonctionner en parallèle, et importez chaque morceau dans un projet séparé.
Téléversement des scans de drones à l'aide de Cintoo Connect
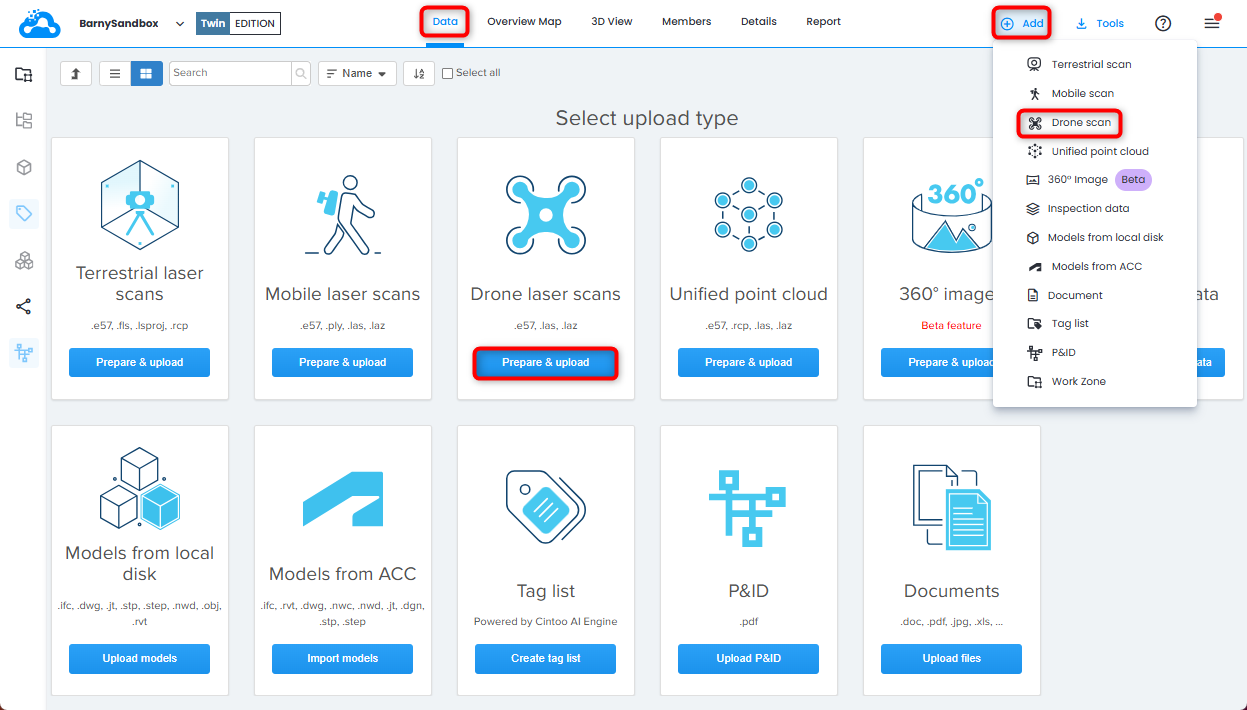
1. Ouvrez l'onglet Données et cliquez sur Préparer & téléverser sur la tuile Scans laser de drones ou cliquez sur Drone scan à partir du menu déroulant en haut à droite. Cintoo Connect se lancera.
2. Depuis l'onglet Scans de drones dans Cintoo Connect, sélectionnez le fichier E57, LAS ou LAZ comme Nuage de points.

3. Modifiez la Distance entre les points de vue virtuels selon les besoins.

Le paramètre Distance entre les points de vue virtuels déterminera le nombre estimé de VVP à générer, qui sera indiqué dans Cintoo Connect et sera ajouté au décompte de scans.
4. Modifiez Données à traiter en parallèle selon les besoins et en fonction des cœurs de PC disponibles.

Avec un PC multi-cœur, il est possible de traiter plus de 2 scans (paramètre par défaut) en parallèle.
En moyenne, au moins 400 MB de RAM par 10 million de pixels sont nécessaires pour le traitement.
Par exemple :
- 8 GB de RAM permettront de traiter 5 scans de 40 million de pixels chacune en parallèle.
- 64 GB de RAM seront nécessaires pour traiter 5 scans de 160 million de pixels chacune en parallèle.
5. Cliquez sur Import.
- De nouvelles numérisations 3D apparaîtront progressivement dans le projet Cintoo
- Vérifiez l'onglet Messages de temps en temps pour confirmer que le processus se déroule sans encombre.

Temps de traitement pour les scans de drone avec Cintoo Connect
Les informations ci-dessous sont données à titre indicatif et peuvent varier en fonction de la capacité de l'ordinateur Windows exécutant Cintoo Connect (Recommandations pour le matériel de bureau ou portable).
Les temps de traitement et le nombre de points de vue virtuels générés sont estimés et peuvent varier en fonction de la densité du nuage de points également. Dans les tableaux ci-dessous, 2 densités de nuage de points sont données à titre d'exemples : 250 points par mètre carré (= 23 points par pied carré) et 2 500 points par mètre carré (= 230 points par pied carré).

Recommandation : Si la zone à traiter est très grande et que le temps de traitement doit être amélioré, il est recommandé de diviser le nuage de points source en morceaux plus petits. Traitez chaque morceau avec une instance distincte de Cintoo Connect qui peut fonctionner en parallèle.
Cet article a-t-il été utile ?
C'est super !
Merci pour votre commentaire
Désolé ! Nous n'avons pas pu vous être utile
Merci pour votre commentaire
Commentaires envoyés
Nous apprécions vos efforts et nous allons corriger l'article