Dieser Artikel beschreibt den Prozess des Importierens von Drohnen-Scandaten in Cintoo mit Cintoo Connect, die Anforderungen und Beschränkungen sowie eine schrittweise Anleitung.
Berechtigungen: Benutzer mit Rollen einschließlich Reality-Daten hochladen oder löschen Berechtigung können Drohnen-Laserscans mit Cintoo Connect importieren.
INHALTSVERZEICHNIS
- Übersicht über Drohnen-Scans
- Anforderungen und Einschränkungen
- Hochladen von Drohnen-Scans mit Cintoo Connect
- Verarbeitungszeit für Drohnen-Scans mit Cintoo Connect
Übersicht über Drohnen-Scans
Mit einer Drohne aufgenommene und mit Photogrammetrie-Lösungen wie Pix4D oder Drone Deploy verarbeitete Fotos erzeugen eine unstrukturierte farbige Punktwolke. Das Hochladen dieser resultierenden unstrukturierten Punktwolke in Cintoo erfordert die Installation und Nutzung von Cintoo Connect Installieren von Cintoo Connect.
Cintoo Connect wird diese unstrukturierte Punktwolke dann verarbeiten und automatisch restrukturieren.
- Restrukturierung bedeutet, dass Cintoo Connect 3D Virtual Vantage Points (VVPs) erstellt, als ob die Drohnendaten von statischen Scannern stammten, die an einem fliegenden Stativ montiert sind, was das Navigationserlebnis erleichtert.
- Die Auflösung dieser neu erstellten 3D VVPs wird automatisch basierend auf der Auflösung der ursprünglichen unstrukturierten Punktwolke berechnet.
- Es gibt keinen Kompromiss bei der Genauigkeit oder Dichte der Punktwolke bei Verwendung dieses Prozesses.
- Jeder dieser neu erstellten 3D VVPs zählt als ein Scan in der Scankapazität.
- Laden Sie neu erstellte 3D VVPs aus Cintoo als einheitliche oder strukturierte Punktwolke herunter und exportieren Sie sie genauso wie die statischen Scandaten.
- Vereinigen Sie statische Scans, mobile Scans und VVPs in Cintoo und navigieren Sie zwischen ihnen, wenn sie das gleiche Koordinatensystem teilen.
Anforderungen und Einschränkungen
Cintoo Connect unterstützt die folgenden Drohnendaten:
- Punktwolke im LAS-, LAZ- oder E57-Dateiformat
- Punktwolke muss eine minimale projizierte Bodenfläche von mindestens 400 Quadratmetern abdecken.
- Punktwolken-Dichte muss höher als 250 Punkte pro Quadratmeter sein (= 23 Punkte pro Quadratfuß oder 1 Punkt pro 6.25cm (2.46 Zoll).
- d.h., Gesamtanzahl der Punkte geteilt durch die projizierte Bodenfläche

- d.h., Gesamtanzahl der Punkte geteilt durch die projizierte Bodenfläche
- Nur horizontale Flüge, die in verschiedenen Höhenlagen erfolgen können:
- Nicht abgedeckt: Vertikale Flüge entlang von Gebäude- oder Stromturmfassaden zum Beispiel. Um nicht-horizontale Flüge zu importieren, versuchen Sie bitte die Unified Point Cloud Option in Cintoo Connect.

- Ist die Punktwolke georeferenziert, muss die Punktwolkendatei eine Pose haben.
- Die Punktwolkendatei darf nur eine Punktwolke enthalten.
- Bei linearen Infrastrukturen muss jedes Projekt kleiner als 10 Kilometer oder 6.2 Meilen sein (= Entfernung zwischen den extremsten Punkten des Projekts).
Hinweis: Wenn das Projekt größer als 10 km ist, wird empfohlen, die Ursprungs-Punktwolke in kleinere Abschnitte zu teilen. Verarbeiten Sie jeden Abschnitt mit einer separaten Cintoo Connect-Instanz, die parallel laufen kann, und importieren Sie jeden Abschnitt in ein separates Projekt.
Hochladen von Drohnen-Scans mit Cintoo Connect
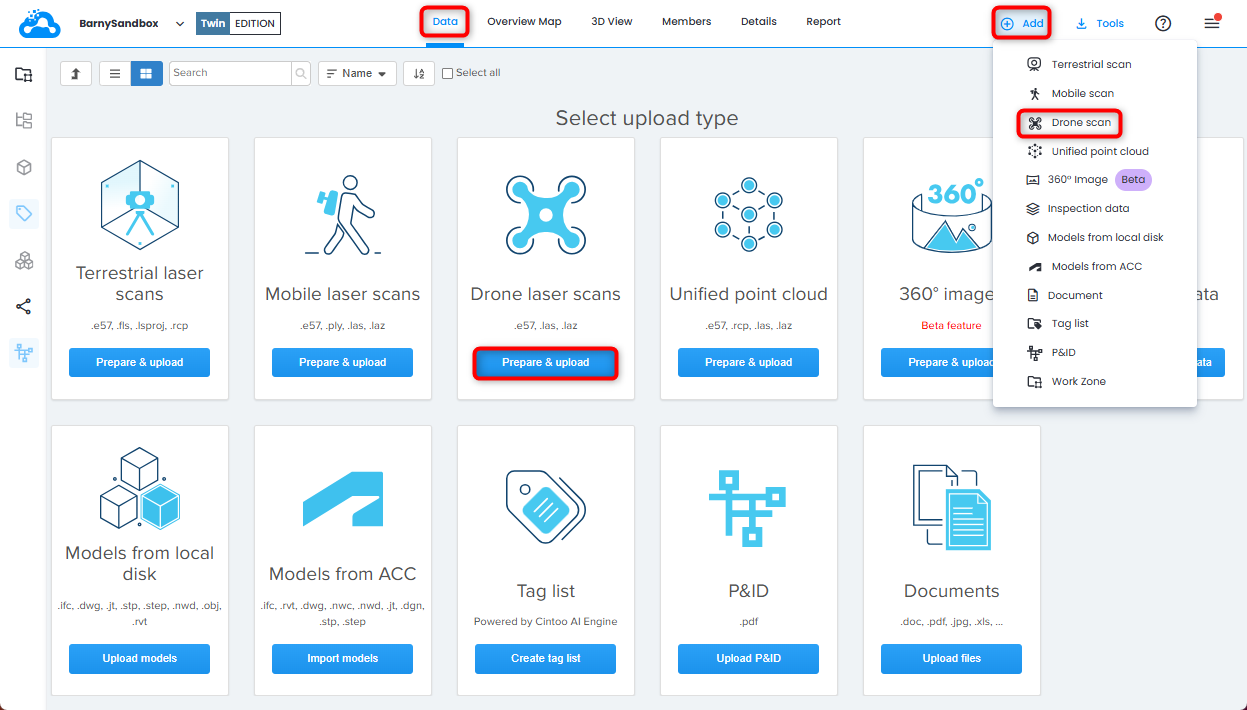
1. Öffnen Sie die Daten Registerkarte und klicken Sie auf Vorbereiten & hochladen auf der Kachel Drohnen-Laserscans oder klicken Sie auf Drohne scan aus dem Menü Dropdown oben rechts. Cintoo Connect wird gestartet.
2. Wählen Sie im Drohnen-Scans-Tab in Cintoo Connect die E57-, LAS- oder LAZ-Datei als Punktwolke.

3. Passen Sie den Abstand zwischen den virtuellen Aussichtspunkten nach Bedarf an.

Die Einstellung Abstand zwischen den virtuellen Aussichtspunkten bestimmt die geschätzte Anzahl der zu generierenden VVPs, die in Cintoo Connect angezeigt und zur Scananzahl hinzugefügt wird.
4. Passen Sie zu verarbeitende Daten parallel Wert nach Bedarf und entsprechend der verfügbaren PC-Kerne an.

Mit einem Multi-Core-PC ist es möglich, mehr als 2 Scans (Standardeinstellung) parallel zu verarbeiten.
Im Durchschnitt sind mindestens 400 MB RAM pro 10 Millionen Pixel erforderlich, um zu verarbeiten.
Zum Beispiel:
- 8 GB RAM ermöglichen die parallele Verarbeitung von 5 Scans mit jeweils 40 Millionen Pixeln.
- 64 GB RAM werden benötigt, um 5 Scans mit jeweils 160 Millionen Pixeln parallel zu verarbeiten.
5. Klicken Sie auf Import.
- Neue 3D-Scans erscheinen nacheinander im Cintoo-Projekt
- Überprüfen Sie von Zeit zu Zeit die Nachrichten Registerkarte, um zu bestätigen, dass der Prozess reibungslos läuft.

Verarbeitungszeit für Drohnen-Scans mit Cintoo Connect
Die unten aufgeführten Informationen dienen zu Referenzzwecken und können je nach Kapazität des Windows-basierten Computers, der Cintoo Connect ausführt, variieren (Desktop- oder Laptop-Hardware-Empfehlungen).
Die Verarbeitungszeiten und die Anzahl der generierten Virtual Vantage Points sind Schätzungen und können ebenfalls je nach Punktwolken-Dichte variieren. In den Tabellen unten werden 2 Punktwolken-Dichten als Beispiele gegeben: 250 Punkte pro Quadratmeter (= 23 Punkte pro Quadratfuß) und 2.500 Punkte pro Quadratmeter (= 230 Punkte pro Quadratfuß).

Empfehlung: Wenn der zu verarbeitende Bereich sehr groß ist und die Verarbeitungszeit verbessert werden muss, wird empfohlen, die Ausgangspunktwolke in kleinere Teile aufzuteilen. Bearbeiten Sie jeden Teil mit einer separaten Instanz von Cintoo Connect, die parallel ausgeführt werden kann.
War dieser Artikel hilfreich?
Das ist großartig!
Vielen Dank für das Feedback
Leider konnten wir nicht helfen
Vielen Dank für das Feedback
Feedback gesendet
Wir wissen Ihre Bemühungen zu schätzen und werden versuchen, den Artikel zu korrigieren