Este artículo describe el proceso de importación de datos de escaneo de drones en Cintoo usando Cintoo Connect, detallando requisitos, restricciones y ofreciendo una guía paso a paso.
Permisos: los usuarios con roles que incluyen Subir o Eliminar Datos de Realidad pueden importar escaneos láser de drones con Cintoo Connect.
ÍNDICE DE CONTENIDOS
- Visión General de los Escaneos de Drones
- Requisitos y Restricciones
- Subida de Escaneos de Drones Usando Cintoo Connect
- Tiempo de Procesamiento para Escaneos de Drones Usando Cintoo Connect
Visión General de los Escaneos de Drones
Las fotos tomadas con un dron y procesadas con soluciones de fotogrametría como Pix4D o Drone Deploy producen una nube de puntos coloreada y no estructurada. Subir esta nube de puntos no estructurada resultante en Cintoo requiere la instalación y el uso de Cintoo Connect Instalación de Cintoo Connect.
Luego, Cintoo Connect procesará esta nube de puntos no estructurada y la reestructurará automáticamente.
- La reestructuración significa que Cintoo Connect creará Puntos de Ventaja Virtual 3D (VVPs) como si los datos del dron provinieran de escáneres estáticos montados en un trípode volador, facilitando así la experiencia de navegación.
- La resolución de esos VVPs 3D recién creados se calcula automáticamente en función de la resolución de la nube de puntos no estructurada de origen.
- No hay compromiso en la precisión ni en la densidad de la nube de puntos al usar este proceso.
- Cada uno de esos VVPs 3D recién creados contará como un escaneo en la capacidad de escaneo.
- Descargue y exporte los VVPs 3D recién creados desde Cintoo como una nube de puntos unificada o estructurada, exactamente como con los datos de escaneo estático.
- Fusione escaneos estáticos, escaneos móviles y VVPs en Cintoo y navegue entre ellos si comparten el mismo sistema de coordenadas.
Requisitos y Restricciones
Cintoo Connect admite los siguientes datos de dron:
- Nube de puntos en formato de archivo LAS, LAZ o E57
- La nube de puntos debe cubrir un área mínima de superficie terrestre proyectada de al menos 400 metros cuadrados
- La densidad de la nube de puntos debe ser superior a 250 puntos por metro cuadrado (= 23 puntos por pie cuadrado, o 1 punto por 6.25cm (2.46in).
- es decir, el número total de puntos dividido por el área de superficie terrestre proyectada

- es decir, el número total de puntos dividido por el área de superficie terrestre proyectada
- Solo vuelos horizontales, que pueden ser a varias altitudes:
- No se cubren: vuelos verticales a lo largo de fachadas de edificios o torres eléctricas, por ejemplo. Para importar vuelos no horizontales, intente usar la opción Nube de Puntos Unificada en Cintoo Connect.

- Si la nube de puntos está georreferenciada, el archivo de la nube de puntos debe tener una pose.
- El archivo de la nube de puntos debe contener solo una nube de puntos.
- Para infraestructura lineal, cada proyecto debe ser menor a 10 kilómetros o 6.2 millas (= distancia entre los puntos más extremos del proyecto).
Nota: si el proyecto es mayor a 10 km, se recomienda dividir la nube de puntos de origen en partes más pequeñas. Procese cada parte con una instancia separada de Cintoo Connect que pueda ejecutarse en paralelo e importe cada parte en un proyecto separado.
Subida de Escaneos de Drones Usando Cintoo Connect
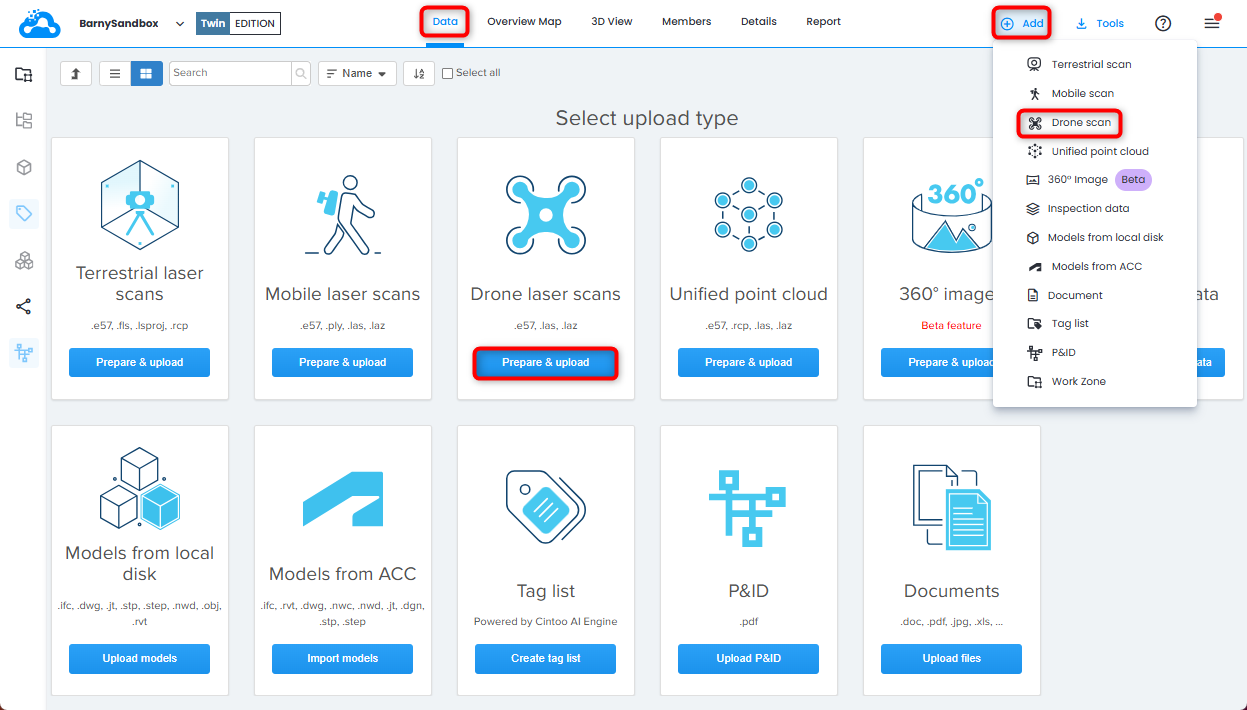
1. Abra la pestaña Datos y haga clic en Preparar & cargar en el mosaico Escaneos láser de drones o haga clic en Drone scan del menú desplegable en la parte superior derecha. Se iniciará Cintoo Connect.
2. Desde la pestaña Escaneos de Drones en Cintoo Connect, seleccione un archivo E57, LAS o LAZ como Point Cloud.

3. Modifique la Distancia entre puntos de ventaja virtual según sea necesario.

La configuración de Distancia entre puntos de ventaja virtual determinará el número estimado de VVP a generar, lo cual se indicará en Cintoo Connect y se añadirá al conteo de escaneos.
4. Modifique Datos a procesar en paralelo según sea necesario y de acuerdo con los núcleos de PC disponibles.

Con un PC multinúcleo es posible procesar más de 2 escaneos (configuración predeterminada) en paralelo.
En promedio, se necesitan al menos 400 MB de RAM por cada 10 millones de píxeles para procesar.
Por ejemplo:
- 8 GB de RAM permitirán procesar 5 escaneos de 40 millones de píxeles cada uno en paralelo.
- Se necesitarán 64 GB de RAM para procesar 5 escaneos de 160 millones de píxeles cada uno en paralelo.
5. Haga clic en Import.
- Los nuevos escaneos 3D aparecerán uno por uno en el proyecto de Cintoo
- Revise la pestaña Mensajes de vez en cuando para confirmar que el proceso funciona sin problemas.

Tiempo de Procesamiento para Escaneos de Drones Usando Cintoo Connect
La información a continuación se proporciona como referencia y puede variar según la capacidad del ordenador basado en Windows que ejecute Cintoo Connect (Recomendaciones de hardware para escritorio o portátil).
Los tiempos de procesamiento y el número de Puntos de Ventaja Virtual generados son estimados y pueden variar dependiendo también de la densidad de la nube de puntos. En las tablas a continuación, se dan 2 densidades de nube de puntos como ejemplos: 250 puntos por metro cuadrado (= 23 puntos por pie cuadrado) y 2,500 puntos por metro cuadrado (= 230 puntos por pie cuadrado).

Recomendación: Si el área a procesar es muy grande y se necesita mejorar el tiempo de procesamiento, se recomienda dividir la nube de puntos de origen en fragmentos más pequeños. Procese cada fragmento con una instancia separada de Cintoo Connect que pueda ejecutarse en paralelo.
¿Le fue útil este artículo?
¡Qué bueno!
Gracias por sus comentarios
¡Sentimos mucho no haber sido de ayuda!
Gracias por sus comentarios
Comentarios enviados
Agradecemos su iniciativa, e intentaremos corregir el artículo