この記事では、Cintoo Connectを使用してCintooにドローンスキャンデータをインポートするプロセスについて、要件と制限事項を概説し、手順を追って説明します。
権限: 役割に Reality Dataのアップロードまたは削除 の権限を含むユーザーは、Cintoo Connectを使用してドローンレーザースキャンをインポートできます。
目次
ドローンスキャンの概要
ドローンで撮影し、Pix4DやDrone Deployなどのフォトグラメトリーソリューションを使用して処理された写真は、未構造化のカラーポイントクラウドを生成します。 この結果として得られた未構造化のポイントクラウドをCintooにアップロードするには、Cintoo Connectのインストールと使用が必要です。Cintoo Connectのインストール。
Cintoo Connectは、この未構造化のポイントクラウドを処理し、自動的に再構築します。
- 再構築とは、Cintoo Connectが3D Virtual Vantage Points(VVP)を作成し、ドローンデータがまるで飛行する三脚に搭載された静止型スキャナーから取得されたようにして、ナビゲーション体験を向上させることを意味します。
- 新しく作成された3D VVPの解像度は、ソースの未構造化ポイントクラウドの解像度に基づいて自動的に計算されます。
- このプロセスを使用すると、ポイントクラウドの精度や密度に妥協はありません。
- これらの新しく作成された3D VVPはそれぞれ、スキャン容量において1つのスキャンとしてカウントされます。
- 新しく作成された3D VVPは、Cintooから静止型スキャンデータと同様に、統一または構造化ポイントクラウドとしてダウンロードおよびエクスポートできます。
- Cintooで静止型スキャン、モバイルスキャン、VVPを統合し、同じ座標系を共有する場合はそれらの間をナビゲートできます。
要件と制限
Cintoo Connectは、次のドローンデータをサポートしています:
- LAS、LAZ、またはE57ファイル形式のポイントクラウド
- ポイントクラウドは少なくとも400平方メートルの最小投影地表面積をカバーする必要があります。
- ポイントクラウド密度は、平方メートルあたり250ポイント以上でなければなりません。 (= 1平方フィートあたり23ポイント、または6.25cmあたり1ポイント (2.46インチ)。)
- すなわち、ポイントの総数を投影地表面積で割ったものです

- すなわち、ポイントの総数を投影地表面積で割ったものです
- さまざまな高度での水平飛行のみ:
- 対象外: 例: 建物のファサードや電塔に沿った垂直飛行。 非水平飛行をインポートするには、Cintoo ConnectでUnified Point Cloudオプションを試してください。

- ポイントクラウドがジオリファレンスされている場合、ポイントクラウドファイルにはポーズが必要です。
- ポイントクラウドファイルには1つのポイントクラウドのみを含める必要があります。
- 線形インフラでは、各プロジェクトは10キロメートルまたは6.2マイル以下でなければなりません。 (= プロジェクトの最も極端なポイント間の距離)
注: プロジェクトが10kmを超える場合、ソースポイントクラウドを小さなチャンクに分割することをお勧めします。 各チャンクを並行して実行できる別のCintoo Connectインスタンスで処理し、それぞれ別のプロジェクトにインポートします。
Cintoo Connectを使用したドローンスキャンのアップロード
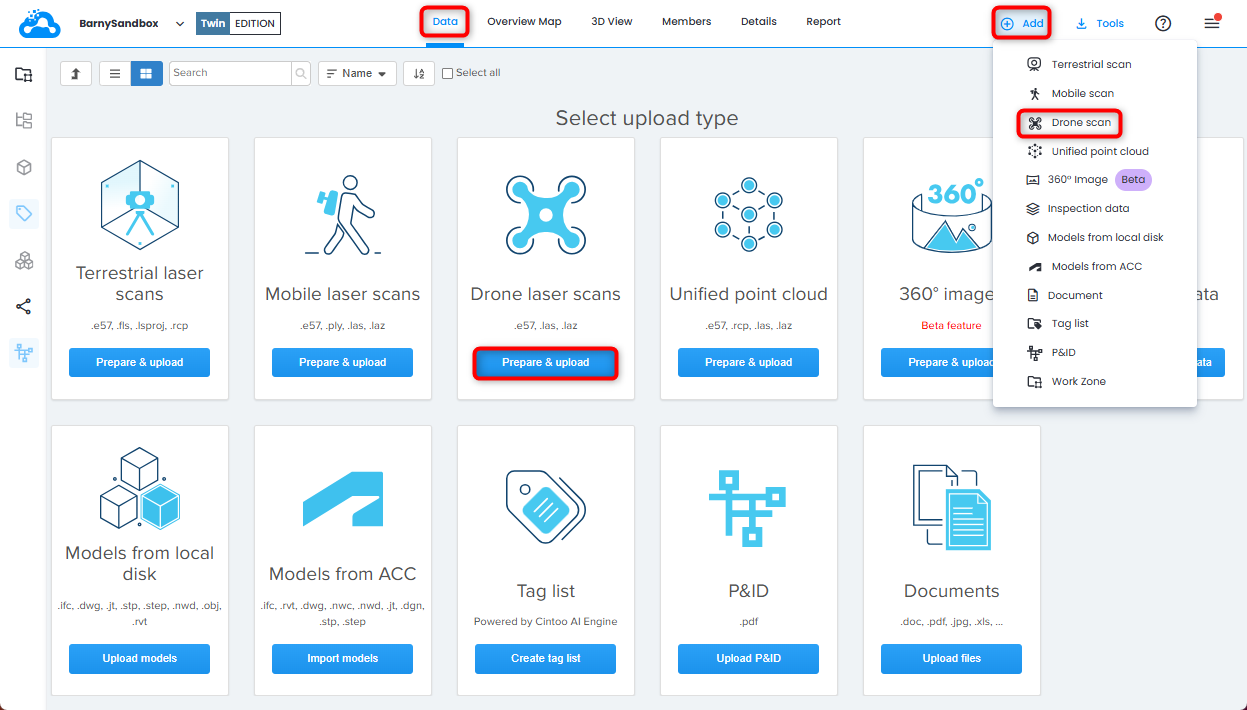
1. Data タブを開き、Drone laser scansタイルでPrepare & uploadをクリックするか、右上のAdd drop-down メニューからDrone scan をクリックしてください。 Cintoo Connectが起動します。
2. Cintoo ConnectのDrone Scansタブから、Point CloudとしてE57、LAS、またはLAZファイルを選択します。

3. 必要に応じて仮想展望ポイント間の距離を変更します。

仮想展望ポイント間の距離 設定は、生成するVVPの推定数を決定し、それはCintoo Connectに表示され、スキャン数に追加されます。
4. 必要に応じてData to process in parallel の値を変更し、利用可能なPCコアに応じて設定します。

マルチコアPCを使用することで、デフォルト設定である2スキャン以上を並行して処理することが可能です。
平均して、処理には少なくとも1,000万ピクセルごとに400MBのRAMが必要です。
例えば:
- 8GBのRAMでは、最大で一度に40百万ピクセルのスキャンを5つ並列処理することができます。
- 64GBのRAMは、160百万ピクセルのスキャンを5つ並列処理するのに必要です。
5. Importをクリックします。
- 新しい3DスキャンはCintooプロジェクトに一つずつ表示されます
- プロセスがスムーズに進行していることを確認するため、ときどきMessages タブを確認してください。

Cintoo Connectを使用したドローンスキャンの処理時間
以下の情報は参考用であり、Cintoo Connectを実行するWindowsベースのコンピュータの容量に応じて異なる場合があります(デスクトップまたはラップトップのハードウェア推奨)。
処理時間と生成される仮想展望ポイントの数は推定であり、ポイントクラウドの密度にも依存して変動する可能性があります。 以下の表では、例として2つのポイントクラウド密度が示されています:平方メートルあたり250ポイント(平方フィートあたり23ポイント)と平方メートルあたり2,500ポイント(平方フィートあたり230ポイント)。

推奨事項: 処理する範囲が非常に広く、処理時間を短縮する必要がある場合は、ソースポイントクラウドをより小さなチャンクに分割することをお勧めします。 各チャンクを並行して実行できる独立したCintoo Connectインスタンスで処理します。
この記事は役に立ちましたか?
それは素晴らしい!
フィードバックありがとうございます
お役に立てず申し訳ございません!
フィードバックありがとうございます
フィードバックを送信しました
記事の改善におけるご協力ありがとうございます。