この文書では、Cintoo Connectを使用して一般的なE57/LAS/LAZ形式のスキャンデータをインポートする方法を説明し、付随するCSVファイルのフォーマットに関するさまざまなオプションを検討します。
権限: 役割に含まれる Upload or Delete Reality Data permission を持つユーザーは、Cintoo Connect を使用して非構造化の一般的な形式のスキャンをインポートできます。
目次
このアップロードオプションでCintoo Connectが期待するデータは次のとおりです:
- E57、LAS、またはLAZ形式の非構造化ポイントクラウド
- 軌跡/スキャンパスはCSV形式 (参照 スキャンパス要件)
Cintoo Connectを使用して一般的なE57/LAS/LAZをアップロード
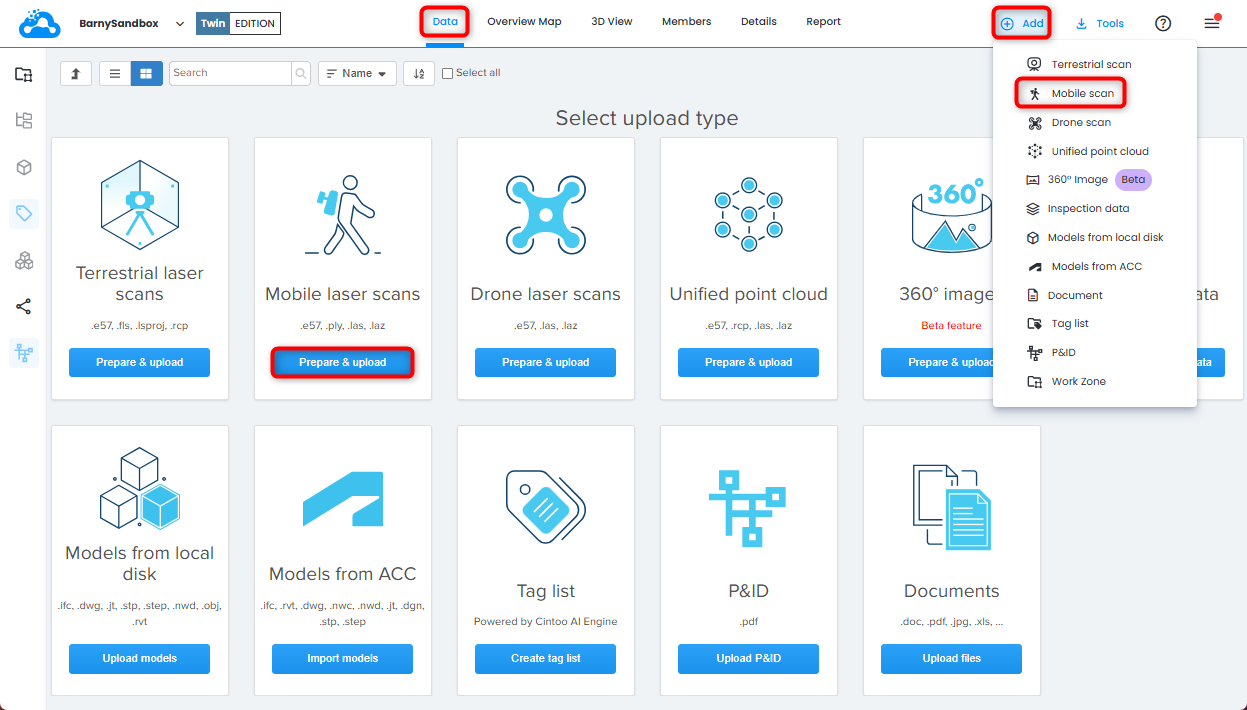
1. Data タブを開き、Mobile laser scansタイルでPrepare & uploadをクリックするか、右上のAdd drop-down メニューからMobile scan をクリックします。 Cintoo Connectが起動します。
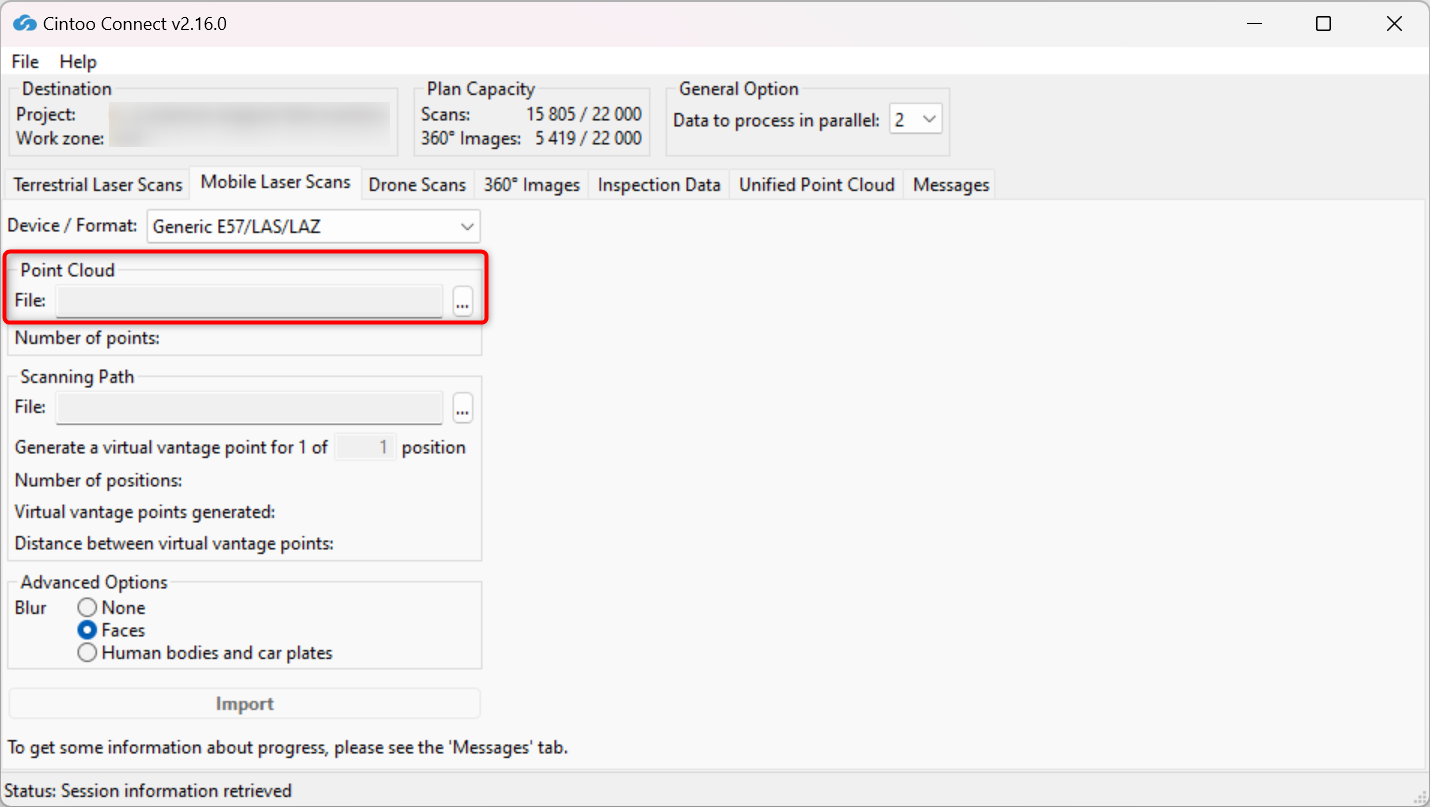
2. Cintoo ConnectのMobile Laser Scansタブで、Generic E57/LAS/LAZをDevice/Formatとして選択します。

3. Point CloudとしてE57、LAS、またはLAZファイルを選択します。
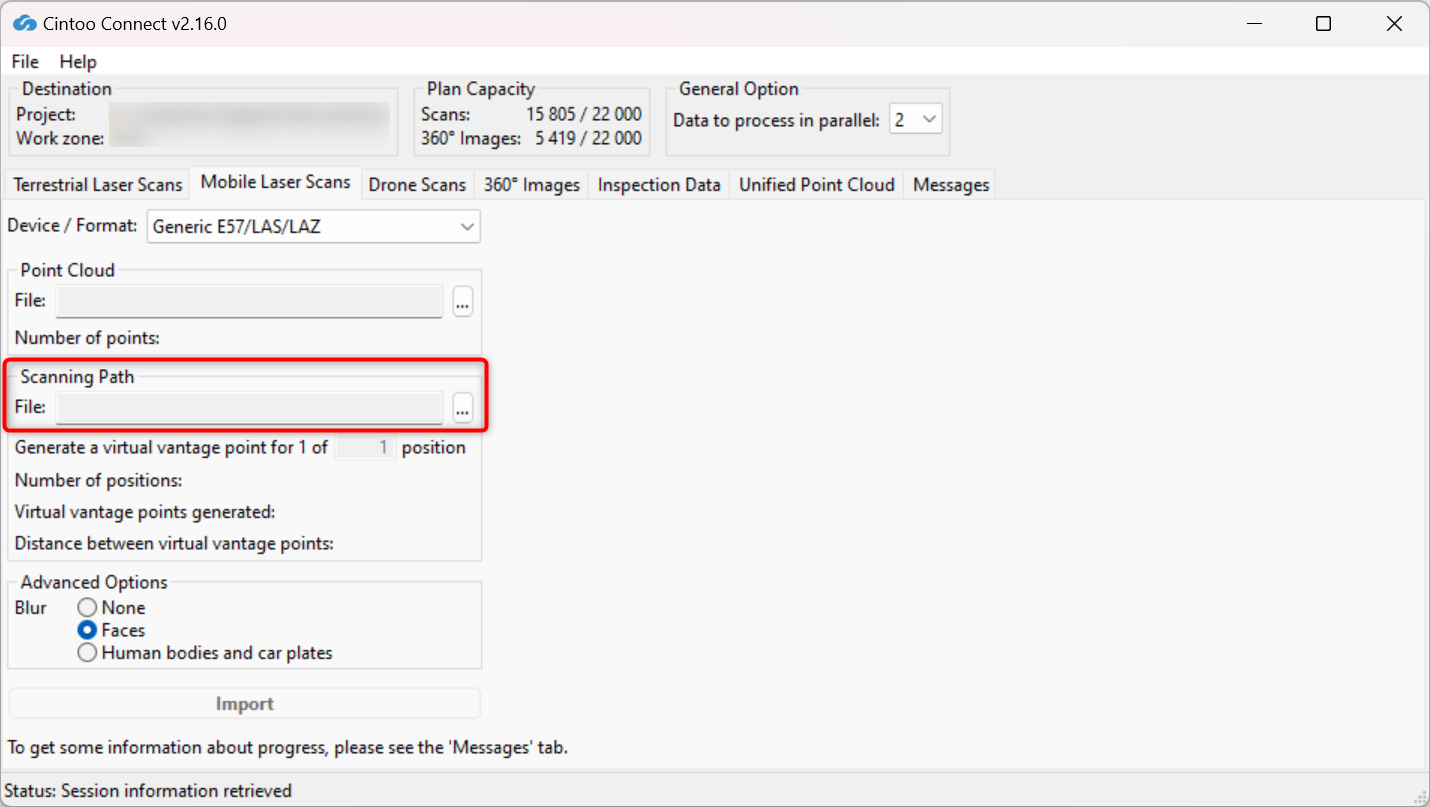
4. Scanning PathとしてCSVファイルを選択します。
詳しくはスキャンパス要件をご覧ください。
5. Generate a virtual vantage point for 1 of__ positionに値を入力して、必要に応じて位置サンプリング値を変更します。
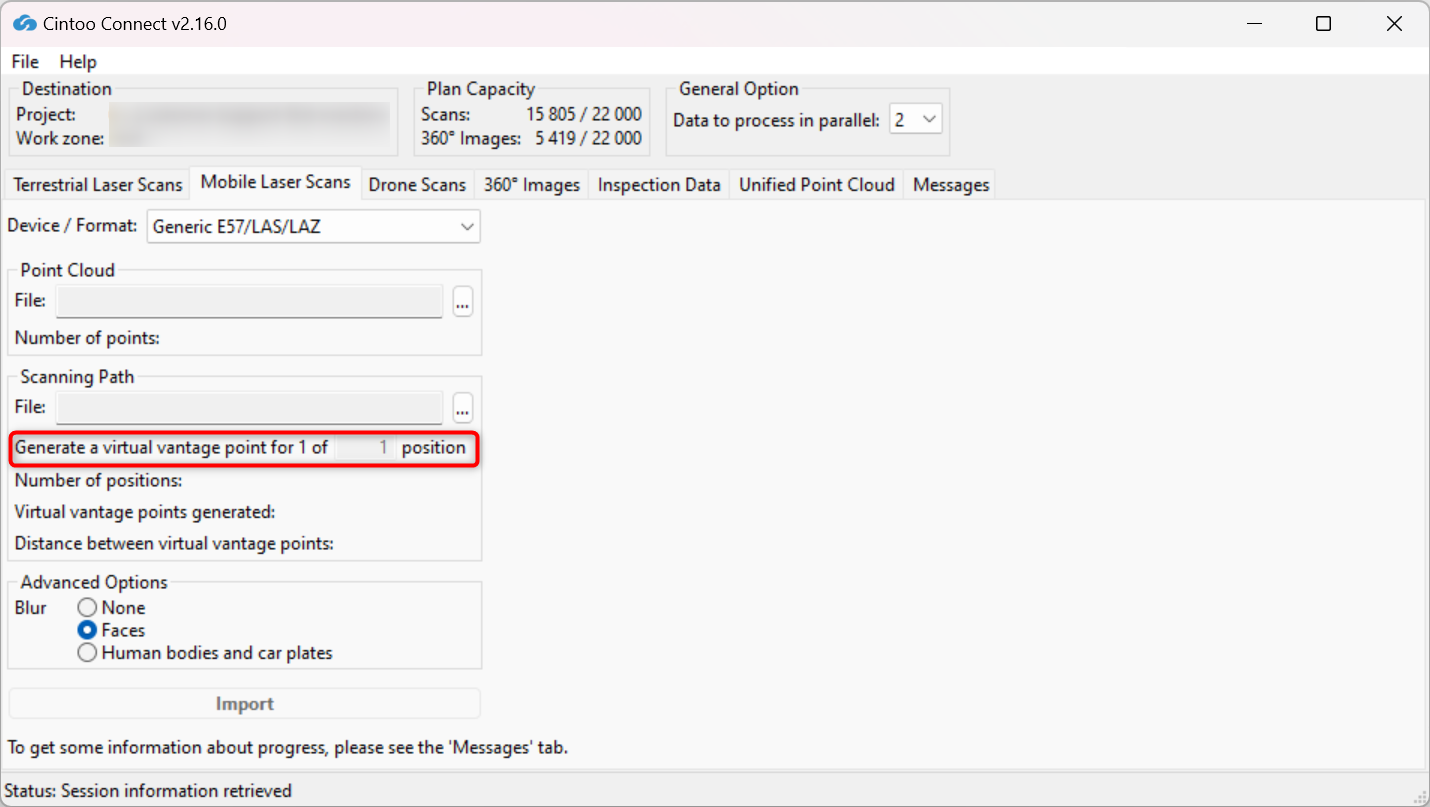
- 例えば、1 of 1 positionでは、スキャンパスCSVに含まれる各位置に対して、Cintooで1つのVirtual Vantage Point(VVP)が作成されます。 1 of 4 positionsでは、スキャンパスCSVに含まれる4番目ごとの位置に1つのVVPが作成されます。
- VVPの数と各VVP間の平均距離はCintoo Connectに表示され、スキャン数に加算されます。
6. Blur - Facesを有効または無効にします。
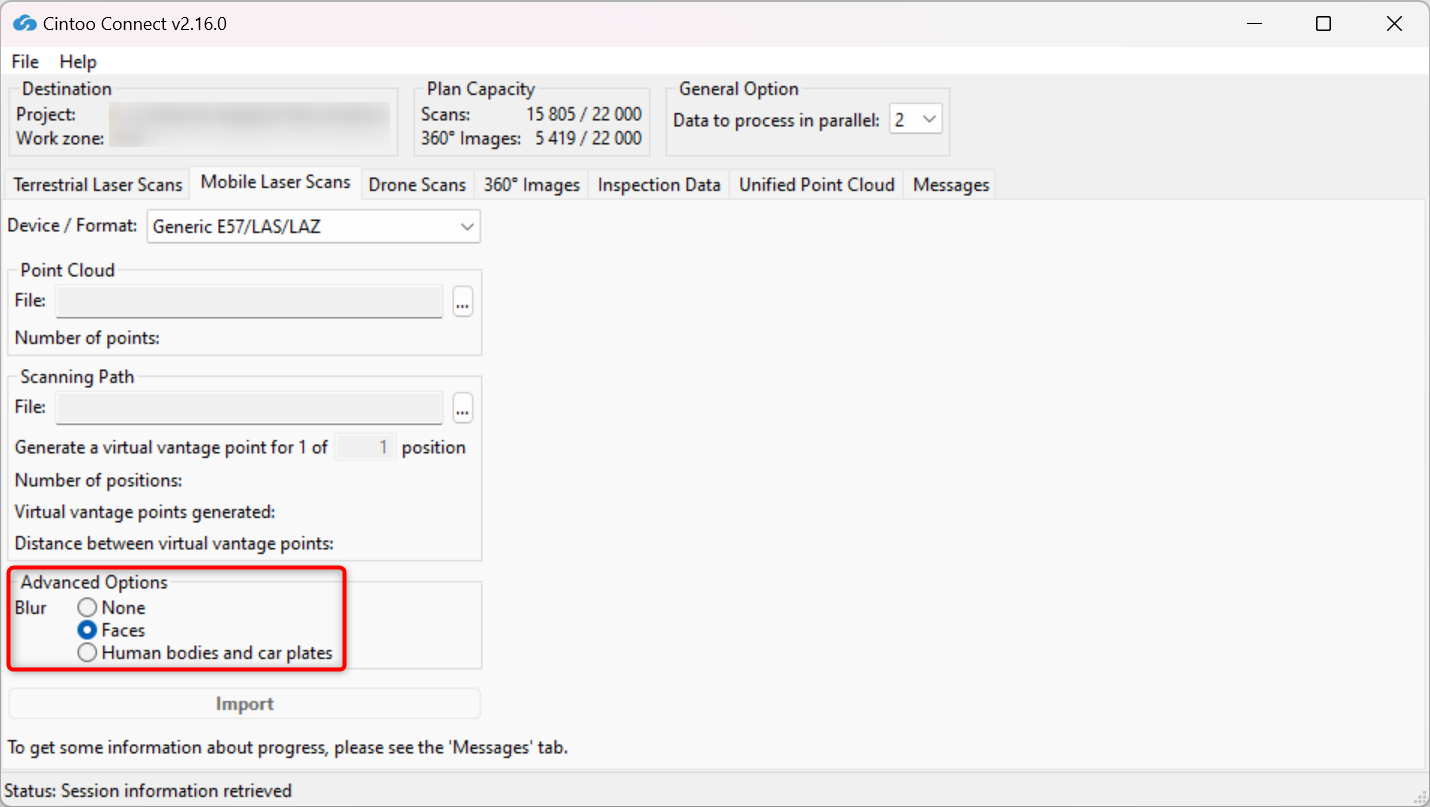
- このオプションはデフォルトで有効になっています。ぼかしを適用しない場合は、オプションNone を選択してください。
- このオプションは、Cintooにアップロードされるスキャンに含まれる任意のパノラマ画像に写った顔を自動的にぼかします。
- スキャンがアップロードされた後、Cintooでのぼかし処理は元に戻せません。
- Blur Facesオプションを有効にせずにアップロードされたファイルは、Cintooプロジェクトから削除され、このオプションをオンにして再アップロードする必要があります。自動で顔をぼかすには、オプションをオンにしてアップロードしてください。
7. Blur - Human bodies and car platesを有効または無効にします。
- このオプションはデフォルトで無効になっており、オプションFaces が選択されています。
- このオプションを有効にすると、Cintooにアップロードされるスキャンに含まれるパノラマ画像に写っている人体(顔を含む)および車のナンバープレートを自動でぼかします。
- スキャンがアップロードされた後、Cintooでのぼかし処理は元に戻せません。
- Blur Human bodies and car platesオプションを有効にせずにアップロードされたファイルは、Cintooプロジェクトから削除され、このオプションをオンにして再アップロードする必要があります。自動的にぼかし処理を適用するには、オプションをオンにしてアップロードしてください。
警告: 必須の場合にのみ注意して使用してください。このオプションを有効にすると、スキャンのインポート時間が2倍になる可能性があります。
8. 使用可能なPCコアに応じて、必要に応じてData to process in parallelの値を変更します。
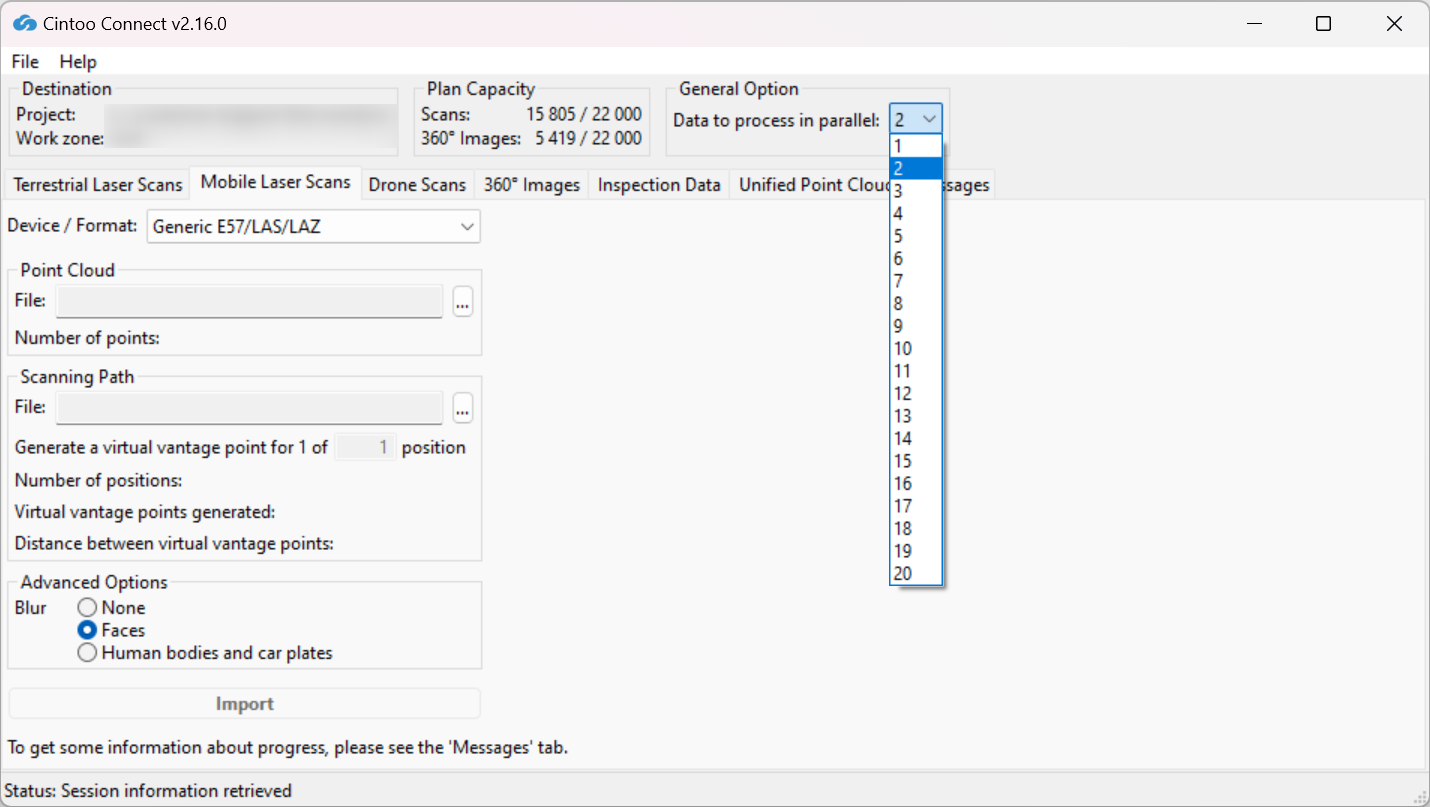
マルチコアPCを使用している場合、2スキャン(デフォルト設定)より多くのスキャンを並列処理できます。
平均して、処理には1000万ピクセルあたり少なくとも400 MBのRAMが必要です。 例えば:
- 8GBのRAMでは、最大で一度に40百万ピクセルのスキャンを5つ並列処理することができます。
- 64GBのRAMは、160百万ピクセルのスキャンを5つ並列処理するのに必要です。
9. Importをクリックします。
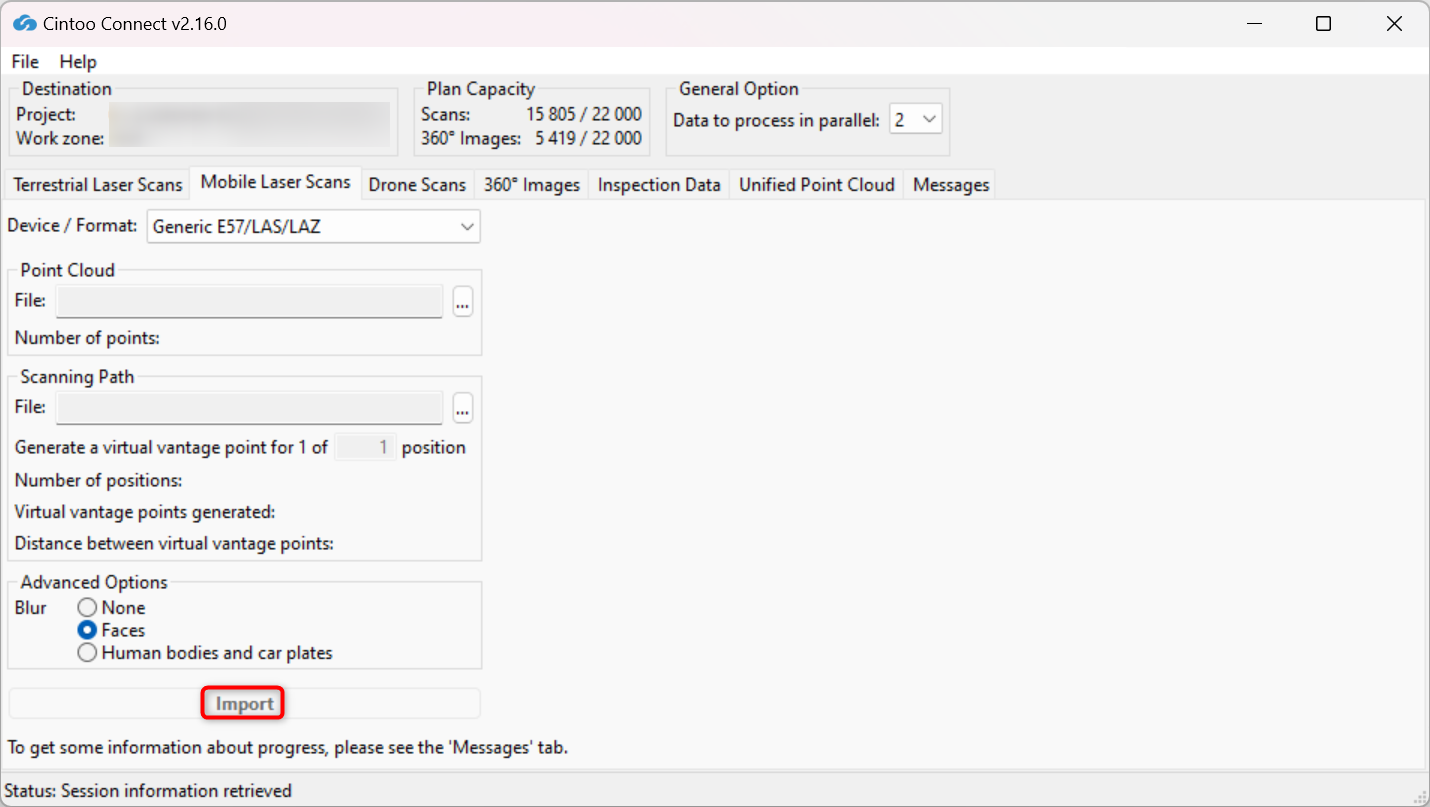
- 新しい3DスキャンはCintooプロジェクトに1つずつ表示されます。
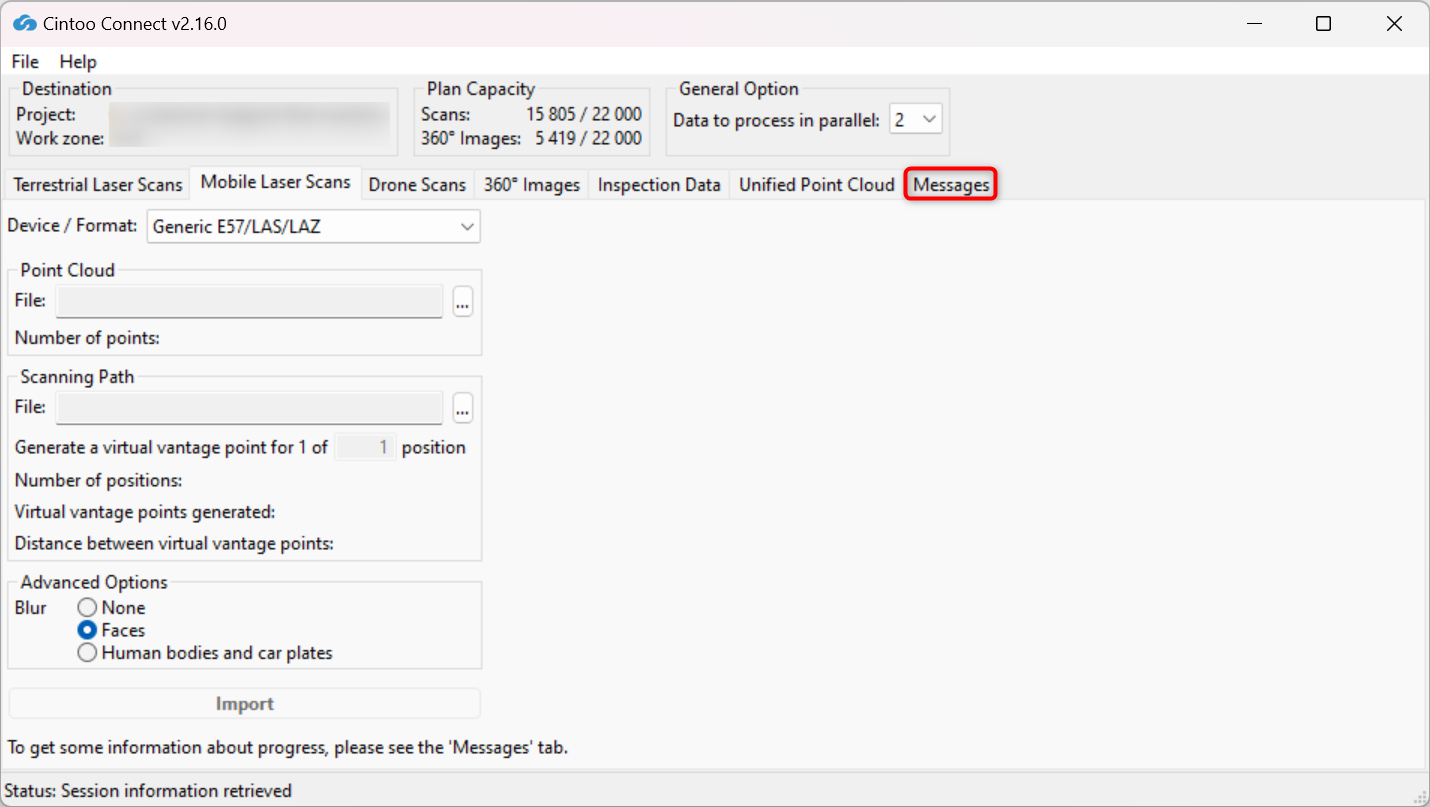
- プロセスが順調に進んでいることを確認するため、時々Messages タブを確認してください。
スキャンパス要件
1. 機器にカメラがない場合(パノラマ画像はキャプチャされません)。
作成する各新規3Dスキャン位置のX、Y、Z位置を含むCSVファイルを作成します。
- 列区切りとしてコンマ ',' を使用します。
- 列名をfilename、x、y、z、qw、qx、qy、qzとします。
- x、y、およびzの値はプロジェクト単位で、スキャンと同じ座標系でなければなりません。
- ポイントクラウドデータを処理すると、Cintoo ConnectはこれらのXYZ位置それぞれに3Dスキャン位置を作成し、ポイントクラウドから作成されたパノラマ画像(ポイントクラウドのカラー化に応じてカラーあり/なし)も生成します。
2. 機器がpanoramic imagesをキャプチャした場合。
関連する360°画像は、各パノラマの位置と向きに関する情報を含むCSVファイルとともに、1つのフォルダに保存されている必要があります。 期待される形式は以下の通りです:
すべての360°画像はJPEGまたはPNG形式の球状画像である必要があります。 球状画像の例。

同じフォルダには、各360°画像の360°画像名(拡張子付き)、位置、および向きを含むCSVファイルを含める必要があります。
CSV ファイルは次のようになっている必要があります:
- 列区切りとしてコンマ(,)を使用
- ファイル名の列はfilenameと名付ける必要があります。
- ファイル名には拡張子(.jpgまたは.png)を含める必要があります。
- 位置については、列名をx、y、zとします。
- x、y、およびzの値はプロジェクト単位で、スキャンと同じ座標系でなければなりません。
- 方向はクォータニオンまたは単純なHeading値で与える必要があります。
注意: 向きとしてクォータニオン表記とHeadingの両方がサポートされているため、同じCSVでHeadingとクォータニオンを併用することはできません。 どちらか一方のみでなければならず、そうでない場合、Cintoo Connectはそれを拒否します。
向きのためのクォータニオンの使用
- 列名をqw、qx、qy、qzとします。
- 最初の列は次のようになっている必要があります(順序は関係ありません): filename、x、y、z、qw、qx、qy、qz
- クォータニオンで回転なしにするには、qw = 1、qx = qy = qz = 0に設定します。

向きのためにHeading値を使用する
CSVファイル内にheading という名前の列を作成します。
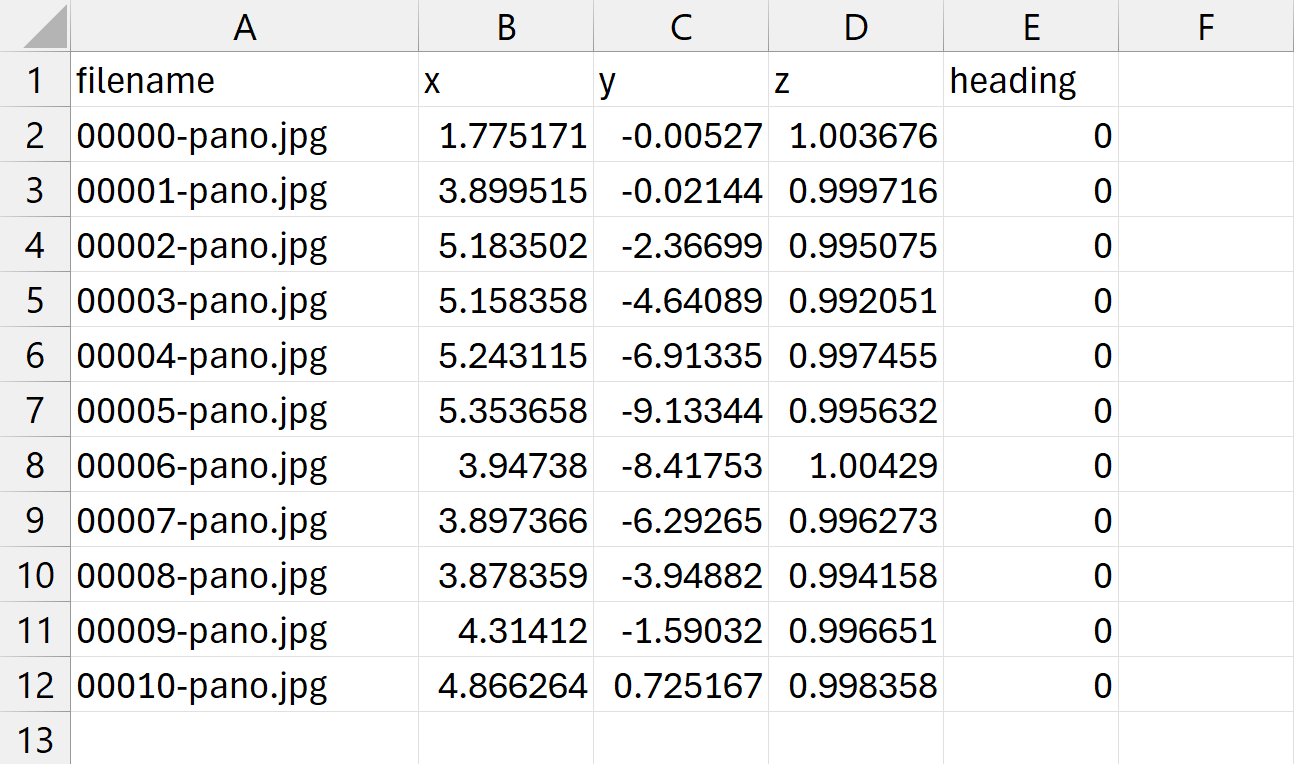
Headingパラメータは度単位の角度、Z軸周りの回転を表します。 上から見ると、正の角度は時計回り(東方向)への回転を表します。
注記: heading を使用する場合、X 軸または Y 軸周りの回転は適用されません。 360画像は垂直方向に正しく整列していると仮定しています(「赤道」ラインを横切る平面はXY平面と平行でなければなりません)。そうでない場合、画像がまっすぐに見えなくなります(例: まっすぐな建物が傾斜して見えることがあります)。
角度は画像の中央と北の方向を基準にします:
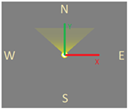
- Headingを0度に設定すると、ユーザーは北(+Y)を向いているときに画像の中央を見ることになります。
- Headingを90度に設定すると、ユーザーは東(+X)を向いているときに画像の中央を見ることになります。
- Headingを180度に設定すると、ユーザーは南(-Y)を向いているときに画像の中央を見ることになります。
- Headingを270度に設定すると、ユーザーは西(+X)を向いているときに画像の中央を見ることになります。
注意: 右下隅のNavigation Mapは、ユーザーが現在どの方向を向いているかを確認するのに役立ちます。
この記事は役に立ちましたか?
それは素晴らしい!
フィードバックありがとうございます
お役に立てず申し訳ございません!
フィードバックありがとうございます
フィードバックを送信しました
記事の改善におけるご協力ありがとうございます。