Este artículo describe cómo importar datos de escaneo en formato E57/LAS/LAZ genérico usando Cintoo Connect y explora diferentes opciones para dar formato al archivo CSV adjunto.
Permisos: usuarios con roles que incluyan Subir o Eliminar Datos de Realidad permiso pueden importar escaneos en formato genérico no estructurado con Cintoo Connect.
ÍNDICE DE CONTENIDOS
- Cargar E57/LAS/LAZ genérico con Cintoo Connect
- Requisitos del Camino de Escaneo
- Usando Cuaterniones para Orientación
- Usando Heading Value para Orientación
Los datos que Cintoo Connect espera para esta opción de carga son los siguientes:
- Nube de puntos no estructurada en formato E57, LAS o LAZ
- Trayectoria /camino de escaneo en formato CSV (ver Requisitos del Camino de Escaneo)
Cargar E57/LAS/LAZ genérico con Cintoo Connect
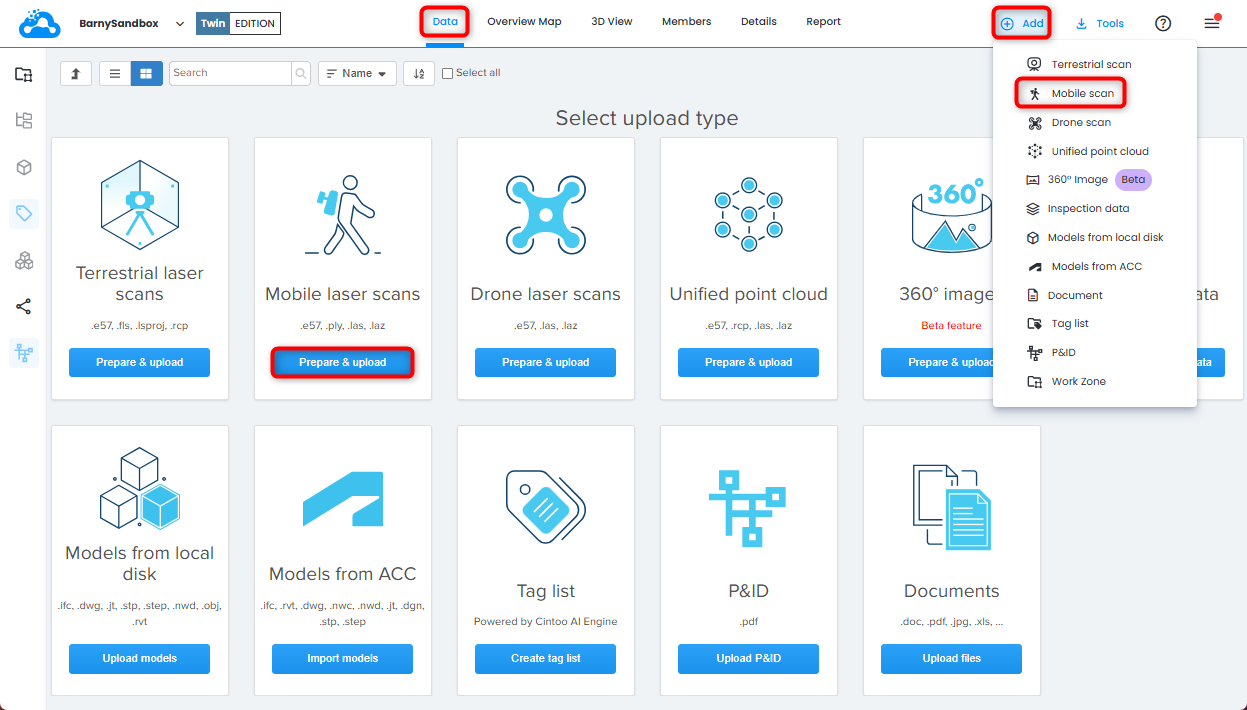
1. Abra la pestaña Datos y haga clic en Preparar & cargar en la ficha Escaneos láser móviles o haga clic en Escaneo móvil del menú desplegable en la parte superior derecha. Se iniciará Cintoo Connect.
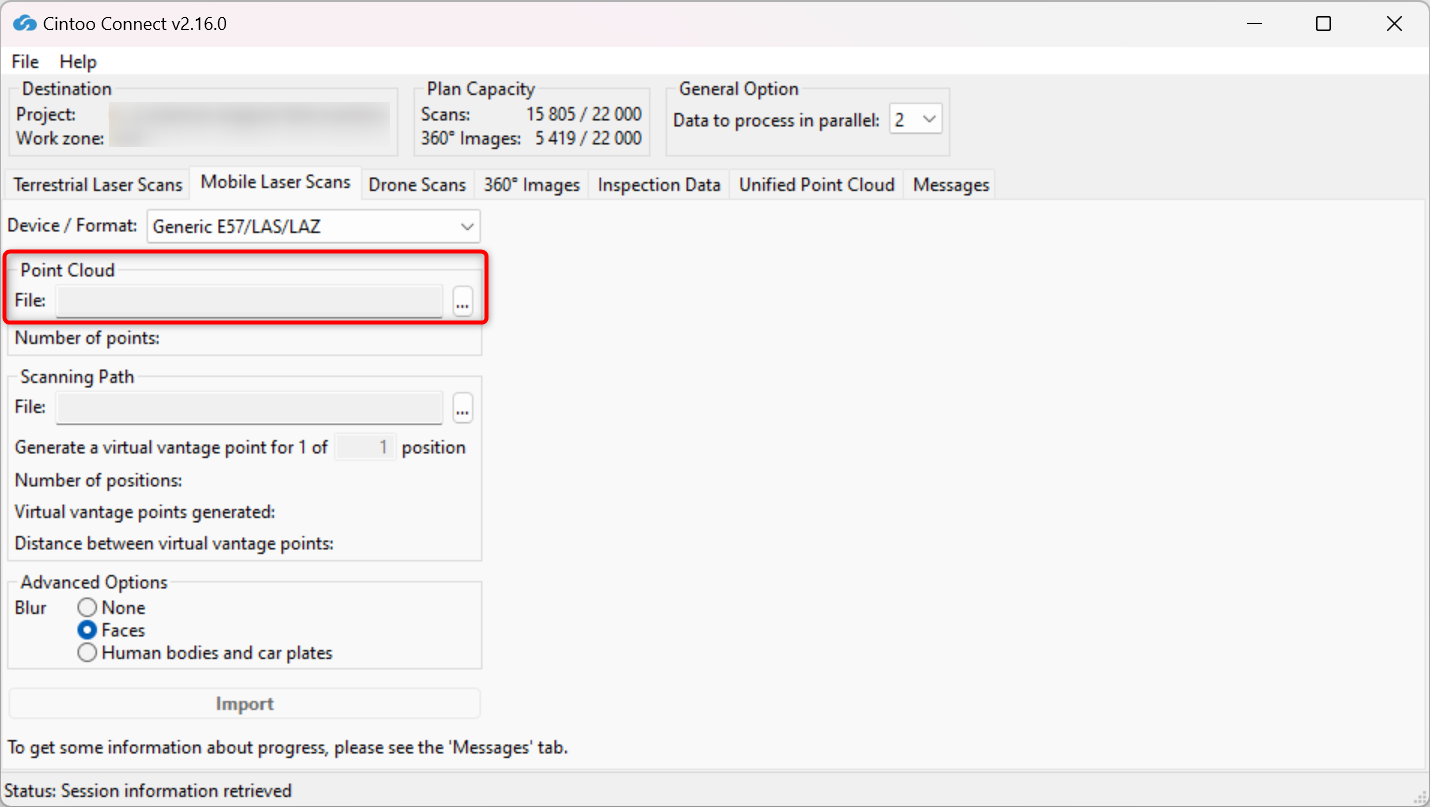
2. En la pestaña Escaneos Láser Móviles en Cintoo Connect, seleccione Genérico E57/LAS/LAZ como Dispositivo/Formato.

3. Seleccione archivo E57, LAS o LAZ como Nube de Puntos.
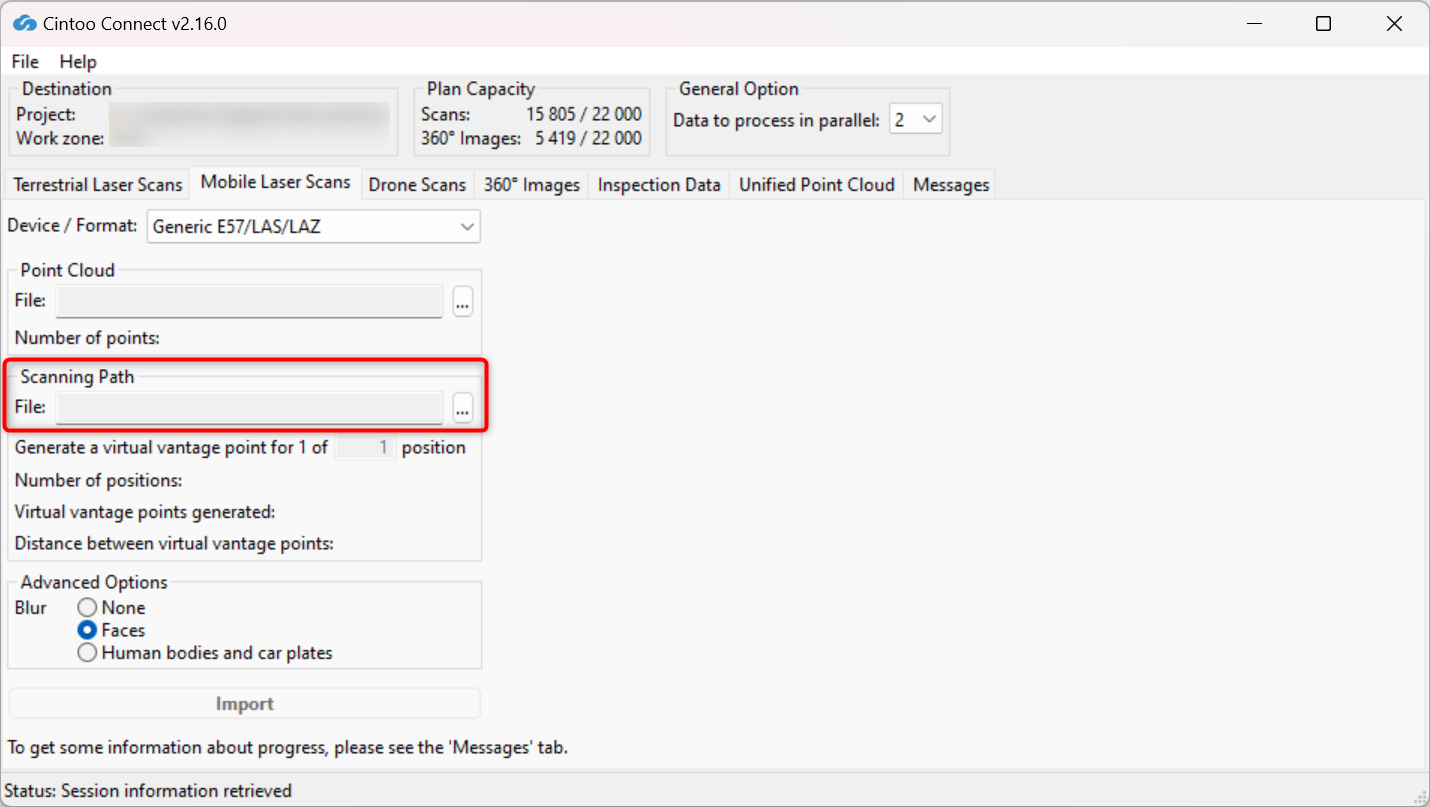
4. Seleccione archivo CSV como Camino de Escaneo.
Consulte Requisitos del Camino de Escaneo para más información.
5. Modifique el valor de muestreo de posición según sea necesario ingresando un valor en Generar un punto de vista virtual para 1 de__ posición.
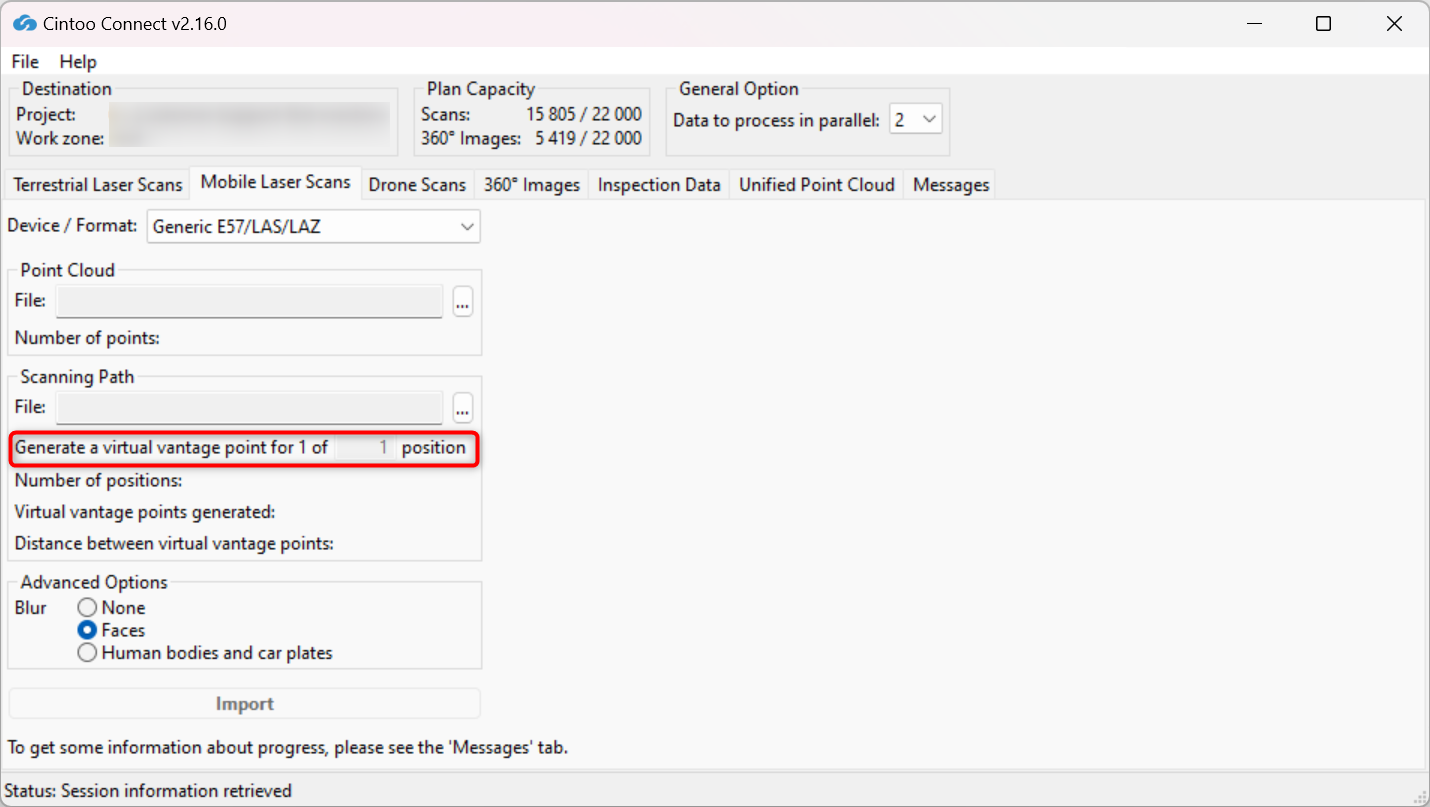
- Por ejemplo, 1 de 1 posición creará 1 Punto de Vista Virtual (VVP) en Cintoo por cada posición incluida en el CSV del camino de escaneo. 1 de 4 posiciones creará 1 VVP en cada 4ª posición incluida en el CSV del camino de escaneo.
- La cantidad de VVP y la distancia promedio entre cada uno serán indicadas en Cintoo Connect y se añadirán al conteo de escaneos.
6. Habilitar o deshabilitar Difuminar - Faces.
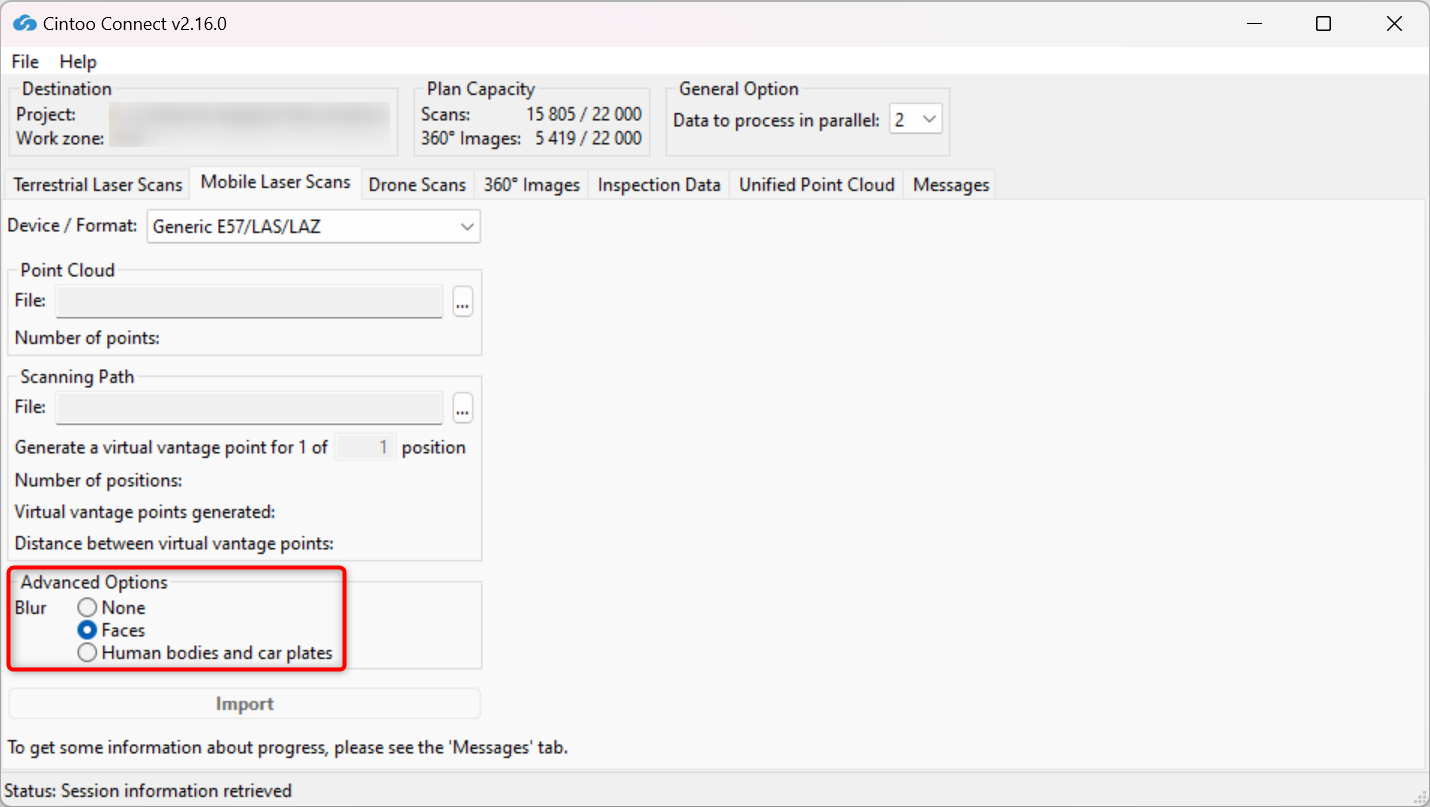
- Esta opción está habilitada por defecto, elija la opción Ninguna para no aplicar ningún desenfoque.
- Esta opción difumina automáticamente los rostros capturados en cualquier imagen panorámica incluida en los escaneos que se suban a Cintoo.
- El difuminado no se puede deshacer en Cintoo después de que los escaneos se hayan subido.
- Cualquier archivo subido sin la opción Difuminar Rostros habilitada debe ser eliminado del proyecto Cintoo y vuelto a subir con la opción marcada para aplicar el difuminado automático de rostros.
7. Habilitar o deshabilitar Difuminar - Cuerpos humanos y matrículas:
- Esta opción está deshabilitada por defecto, la opción Rostros está seleccionada.
- Habilite esta opción para difuminar automáticamente cuerpos humanos incluyendo rostros y matrículas capturados en cualquier imagen panorámica incluida en las exploraciones que se están cargando a Cintoo.
- El difuminado no se puede deshacer en Cintoo después de que los escaneos se hayan subido.
- Cualquier archivo subido sin la opción Blur Human bodies and car plates habilitada debe ser eliminado del proyecto Cintoo y vuelto a subir con la opción marcada para aplicar el difuminado automático.
Advertencia: úselo con cuidado solo si es imprescindible, ya que el tiempo de importación del escaneo podría duplicarse con la opción habilitada.
8. Modifique el valor de Datos a procesar en paralelo según sea necesario y de acuerdo con los núcleos de PC disponibles.
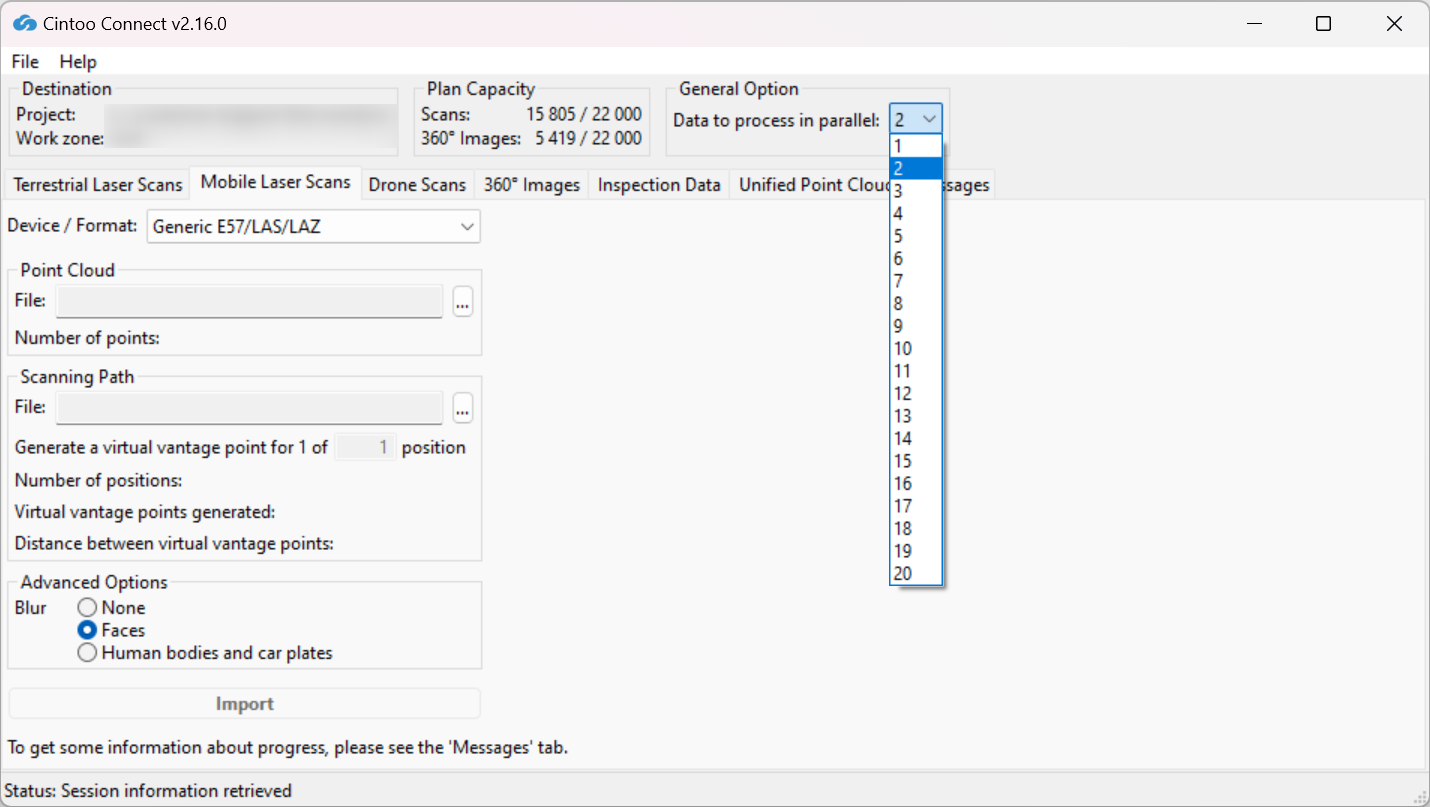
Con una PC multinúcleo, es posible procesar más de 2 escaneos (configuración predeterminada) en paralelo.
En promedio, se necesitan al menos 400 MB de RAM por cada 10 millones de píxeles para procesar. Por ejemplo:
- 8 GB de RAM permitirán procesar 5 escaneos de 40 millones de píxeles cada uno en paralelo.
- Se necesitarán 64 GB de RAM para procesar 5 escaneos de 160 millones de píxeles cada uno en paralelo.
9. Haga clic en Importar.
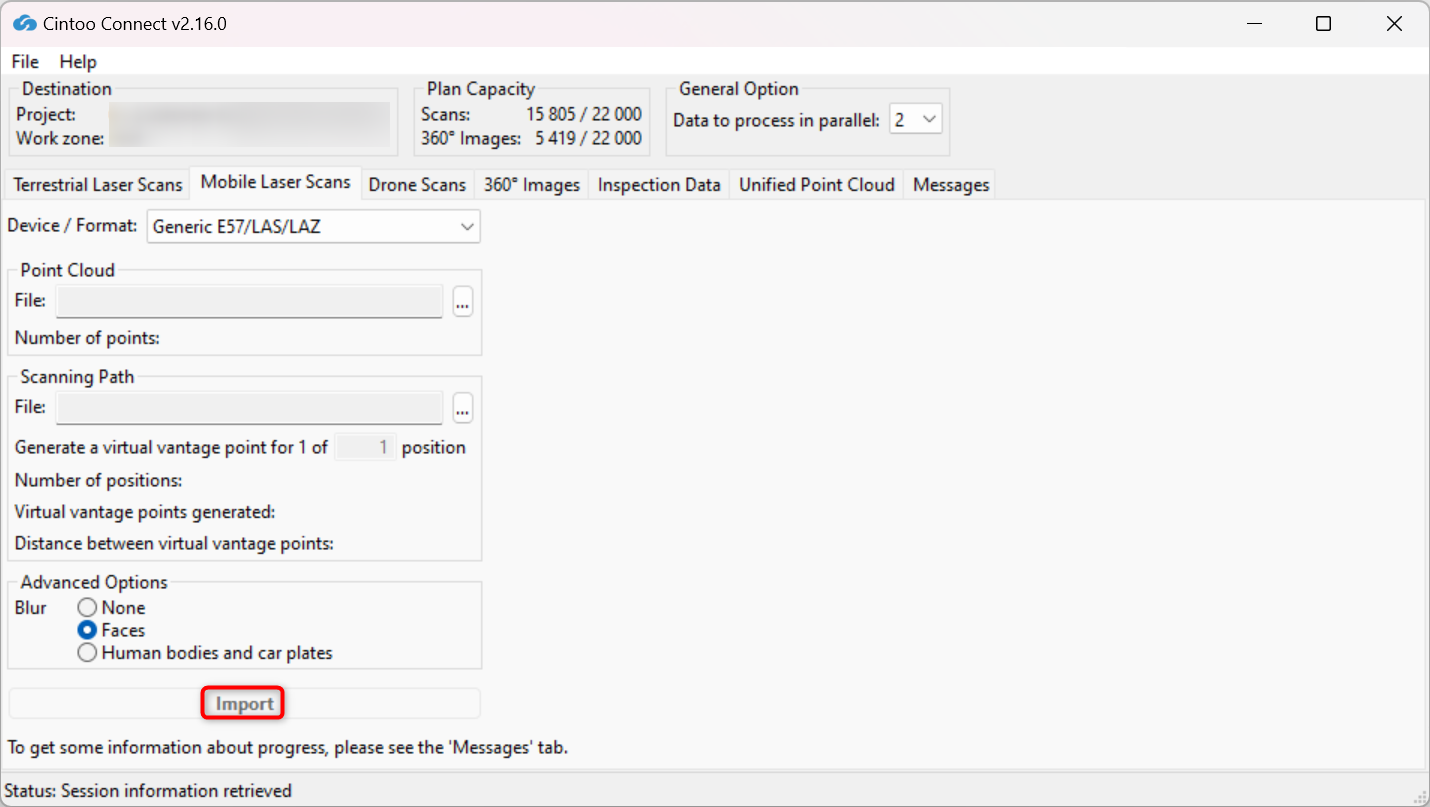
- Nuevos escaneos 3D aparecerán uno por uno en el proyecto Cintoo.
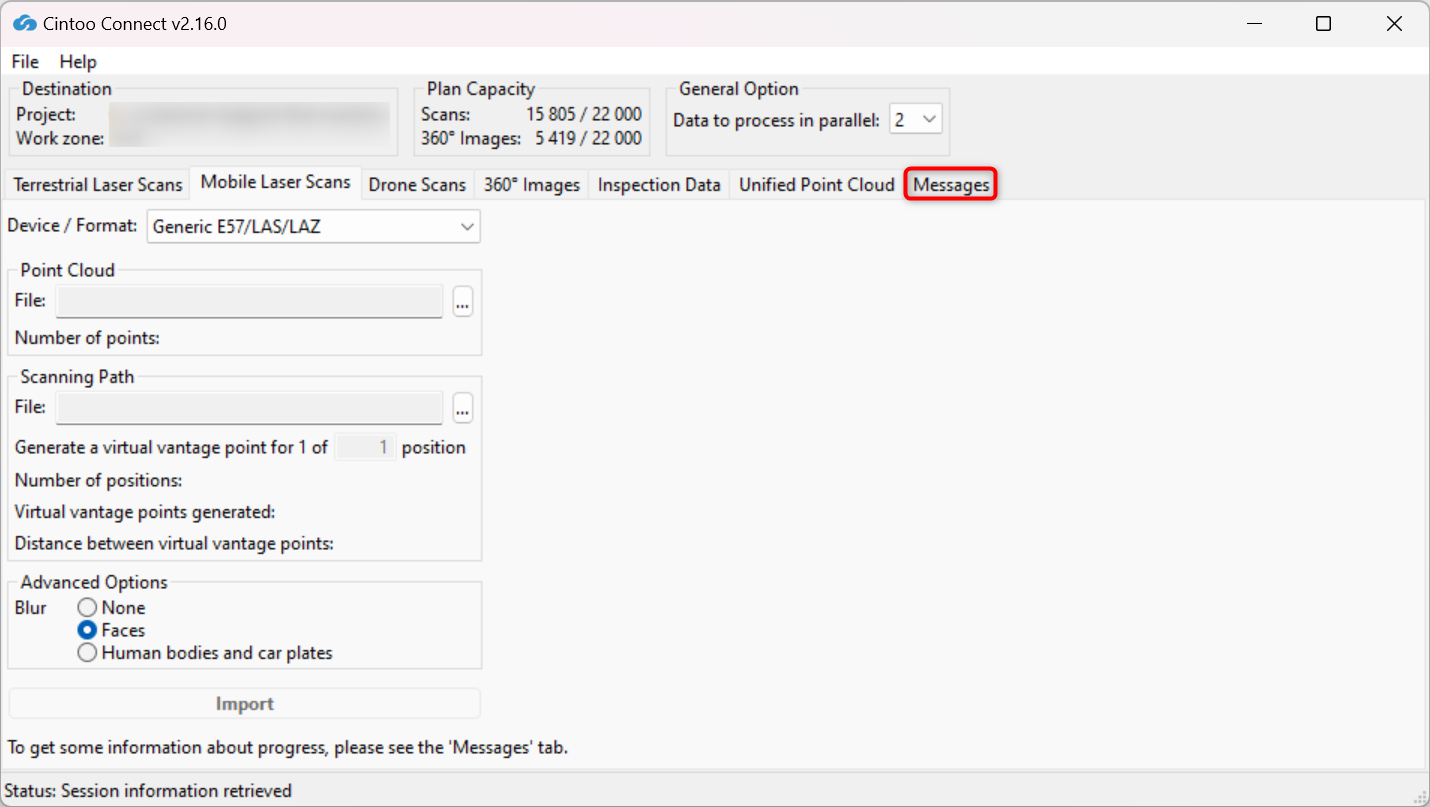
- Revise la pestaña Mensajes de vez en cuando para confirmar que el proceso funciona sin problemas.
Requisitos del Camino de Escaneo
1. Si el equipo no tiene cámara (no se capturan imágenes panorámicas).
Cree un archivo CSV que contenga la ubicación X, Y y Z para cada nueva posición de escaneo 3D que se vaya a crear.
- Use la coma ',' como separador de columnas.
- Nombre las columnas como nombre de archivo, x, y, z, qw, qx, qy, qz
- Los valores x, y y z deben estar en las unidades del proyecto, en el mismo sistema de coordenadas que los escaneos.
- Al procesar datos de nube de puntos, Cintoo Connect creará una posición de escaneo 3D en cada una de estas ubicaciones XYZ, junto con una imagen panorámica hecha a partir de la nube de puntos (con o sin color, según la colorización de la nube de puntos).
2. Si el equipo ha capturado imágenes panorámicas.
Las imágenes 360° asociadas deben almacenarse en una sola carpeta junto con un archivo CSV que contenga la información sobre la ubicación y la orientación de cada panorama. Los formatos esperados son los siguientes:
Todas las imágenes 360° deberán ser imágenes esféricas en JPEG o PNG. Ejemplo de imagen esférica.

La misma carpeta debe incluir un archivo CSV que contenga el nombre de la imagen 360° (con extensión), la ubicación y la orientación, para cada imagen 360°.
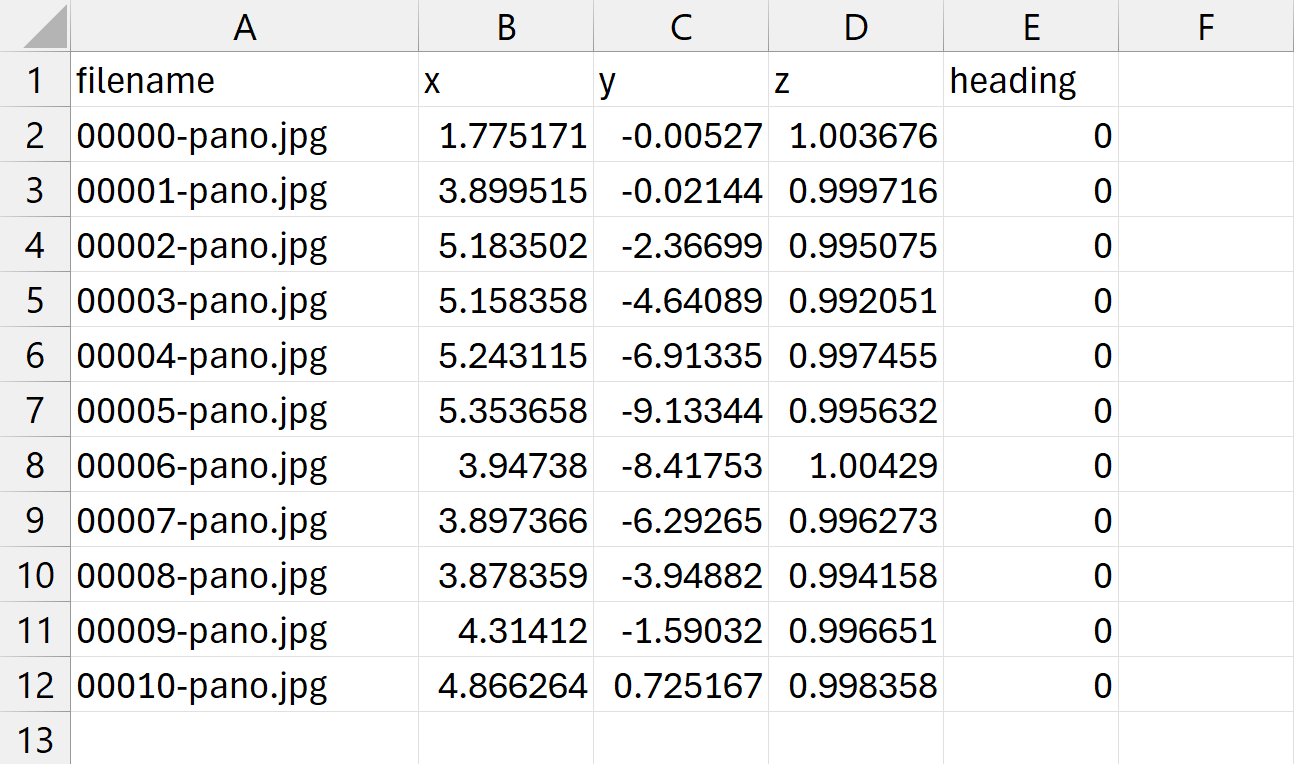
El archivo CSV deberá ser el siguiente:
- Use la coma (,) como separador de columnas
- La columna del nombre del archivo debe llamarse filename
- Los nombres de archivo deben incluir su extensión (.jpg o .png)
- Para la posición, nombre las columnas como x, y y z
- Los valores x, y y z deben estar en las unidades del proyecto, en el mismo sistema de coordenadas que los escaneos.
- La orientación debe darse como un cuaternión o como un Heading simple
Nota: como se admiten tanto la notación de cuaterniones como Heading como orientación, no es posible tener Heading y cuaterniones en el mismo CSV. Debe ser uno o el otro; de lo contrario, Cintoo Connect lo rechazará.
Usando Cuaterniones para Orientación
- Nombre las columnas como qw, qx, qy, qz
- La primera columna debería verse así (el orden no importa): filename, x, y, z, qw, qx, qy, qz
- Establezca qw = 1 y qx = qy = qz = 0 para no aplicar rotación con cuaterniones.

Usando Heading Value para Orientación
Cree una columna llamada heading en el archivo CSV.
El parámetro Heading representa el ángulo en grados, rotación alrededor del eje Z. Desde la vista superior, un ángulo positivo representa una rotación en el sentido de las agujas del reloj (hacia el este).
Nota: al usar Heading no se aplicará rotación alrededor de los ejes X o Y. Suponemos que las imágenes 360° están bien alineadas verticalmente (el plano que cruza la línea del "ecuador" debe ser paralelo al plano XY); de lo contrario, la imagen parecerá no estar recta (ejemplo: un edificio recto parecería tener cierta inclinación).
El ángulo toma como referencia el centro de la imagen y la dirección norte:
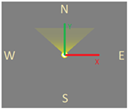
- Heading establecido en 0 grados significa que el usuario verá el centro de la imagen al mirar hacia el norte (+Y).
- Heading establecido en 90 grados significa que el usuario verá el centro de la imagen al mirar hacia el este (+X).
- Heading establecido en 180 grados significa que el usuario verá el centro de la imagen al mirar hacia el sur (-Y).
- Heading establecido en 270 grados significa que el usuario verá el centro de la imagen al mirar hacia el oeste (+X).
Nota: Navigation Map en la esquina inferior derecha puede ayudar a descubrir en qué dirección el usuario está mirando actualmente.
¿Le fue útil este artículo?
¡Qué bueno!
Gracias por sus comentarios
¡Sentimos mucho no haber sido de ayuda!
Gracias por sus comentarios
Comentarios enviados
Agradecemos su iniciativa, e intentaremos corregir el artículo