This article describes the process of importing drone scan data into Cintoo using Cintoo Connect, outlining requirements, restrictions and providing a step-by-step guidance.
Permissions: users with roles including Upload or Delete Reality Data permission can import drone laser scans with Cintoo Connect.
TABLE OF CONTENTS
- Overview of Drone Scans
- Requirements and Restrictions
- Uploading Drone Scans Using Cintoo Connect
- Processing Time for Drone Scans Using Cintoo Connect
Overview of Drone Scans
Photos shot with a drone and processed using photogrammetry solutions such as Pix4D or Drone Deploy produce an unstructured colored point cloud. Uploading this resulting unstructured point cloud in Cintoo requires installation and use of Cintoo Connect Installing Cintoo Connect.
Cintoo Connect will then process this unstructured point cloud and restructure it automatically.
- Restructuring means that Cintoo Connect will create 3D Virtual Vantage Points (VVPs) as if drone data was coming from a flying tripod-mounted static scanners, thus facilitating the navigation experience.
- Resolution of those newly created 3D VVPs is computed automatically based on the resolution of the source unstructured point cloud.
- There is no compromise on point cloud accuracy or density when using this process.
- Each of those newly created 3D VVPs will count as one scan in scan capacity.
- Download and export newly created 3D VVPs from Cintoo as a unified or structured point cloud exactly as with the static scan data.
- Merge static scans, mobile scans and VVPs in Cintoo and navigate between them if they share the same coordinate system.
Requirements and Restrictions
Cintoo Connect supports the following drone data:
- Point cloud in LAS, LAZ, or E57 file format
- Point cloud must cover a minimum projected ground surface area of at least 400 square meters
- Point cloud density must be higher than 250 points per square meter (= 23 points per square foot, or 1 point per 6.25cm (2.46in).
- i.e., total number of points divided by the projected ground surface area

- i.e., total number of points divided by the projected ground surface area
- Horizontal flights only, that can be at various altitudes:
- Not covered: vertical flights along building facades or electric towers for example. To import non-horizontal flights please try using the Unified Point Cloud option in Cintoo Connect.

- If point cloud is georeferenced, point cloud file must have a pose.
- Point cloud file must contain only one point cloud.
- For linear infrastructure, each project must be smaller than 10 kilometers or 6.2 miles (= distance between the most extreme points of the project).
Note: if the project is larger than 10 km, it is recommended to split the source point cloud into smaller chunks. Process each chunk with a separate Cintoo Connect instance that can run in parallel and import each chunk in a separate project.
Uploading Drone Scans Using Cintoo Connect
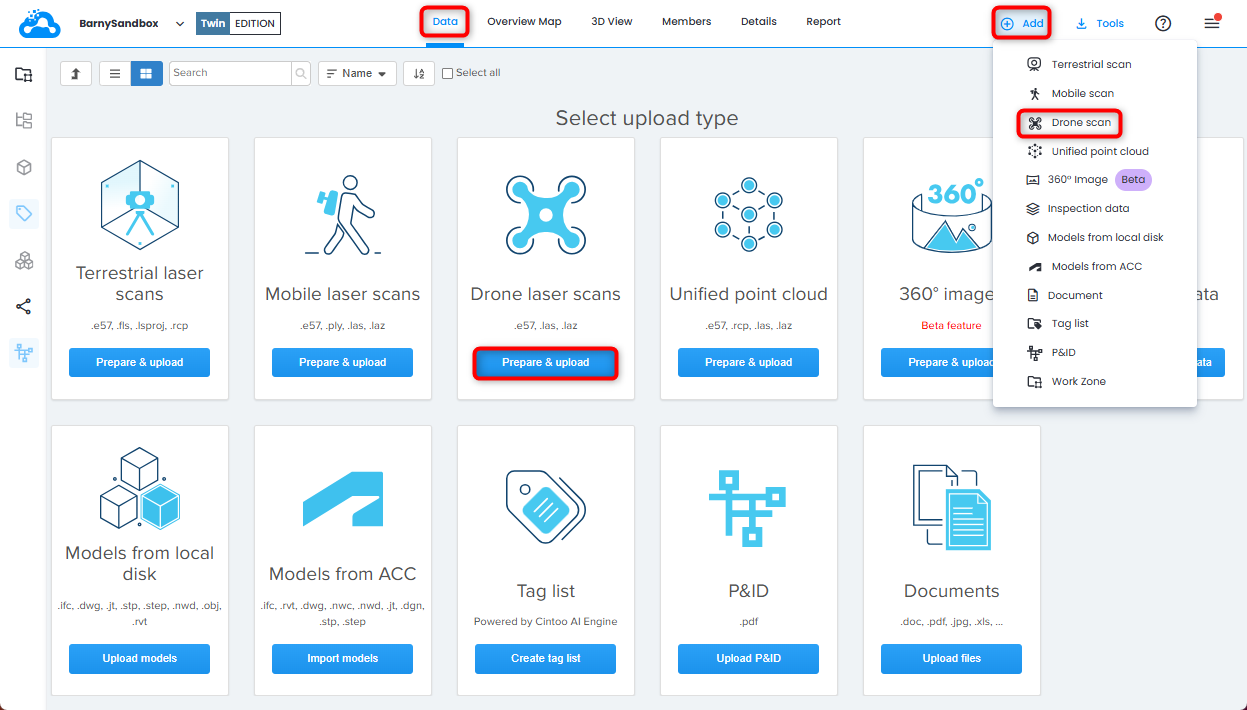
1. Open Data tab and click Prepare & upload on Drone laser scans tile or click Drone scan from Add drop-down menu on the top right. Cintoo Connect will launch.
2. From Drone Scans tab in Cintoo Connect, select E57, LAS, or LAZ file as Point Cloud.

3. Modify Distance between virtual vantage points as needed.

Distance between virtual vantage points setting will determine the estimated number of VVPs to generate, which will be indicated in Cintoo Connect and will be added to scan count.
4. Modify Data to process in parallel value as needed and according to available PC cores.

With a multi-core PC it is possible to process more than 2 scans (default setting) in parallel.
On average, at least 400 MB of RAM per 10 million pixels is needed to process.
For example:
- 8 GB of RAM will allow to process 5 scans of 40 million pixels each in parallel.
- 64 GB of RAM will be needed to process 5 scans of 160 million pixels each in parallel.
5. Click Import.
- New 3D scans will appear one by one in Cintoo project
- Check Messages tab from time to time to confirm the process is running smoothly.

Processing Time for Drone Scans Using Cintoo Connect
Information below is given for reference and may vary depending on the capacity of Windows-based computer running Cintoo Connect (Desktop or laptop hardware recommendations).
Processing times and number of Virtual Vantage Points generated are estimated and may vary depending on the point cloud density as well. In tables below, 2 point cloud densities are given as examples: 250 points per square meter (= 23 points per square foot) and 2,500 points per square meter (= 230 points per square foot).

Recommendation: If the area to process is very large and processing time needs to be improved, it is recommended to split source point cloud into smaller chunks. Process each chunk with a separate Cintoo Connect instance that can run in parallel.
Was this article helpful?
That’s Great!
Thank you for your feedback
Sorry! We couldn't be helpful
Thank you for your feedback
Feedback sent
We appreciate your effort and will try to fix the article